简介
本文主要是针对新思的I2C控制器的学习,翻译。
本文涉及:
chapter1,2,3。主要包括协议部分,操作模式以及编程方式,特性介绍,Timing参数以及计算方式,clocks&resets,DMA接口,控制器主要信号介绍。
Synopsys DW_apb_i2c
General Product Description
支持以下Features:
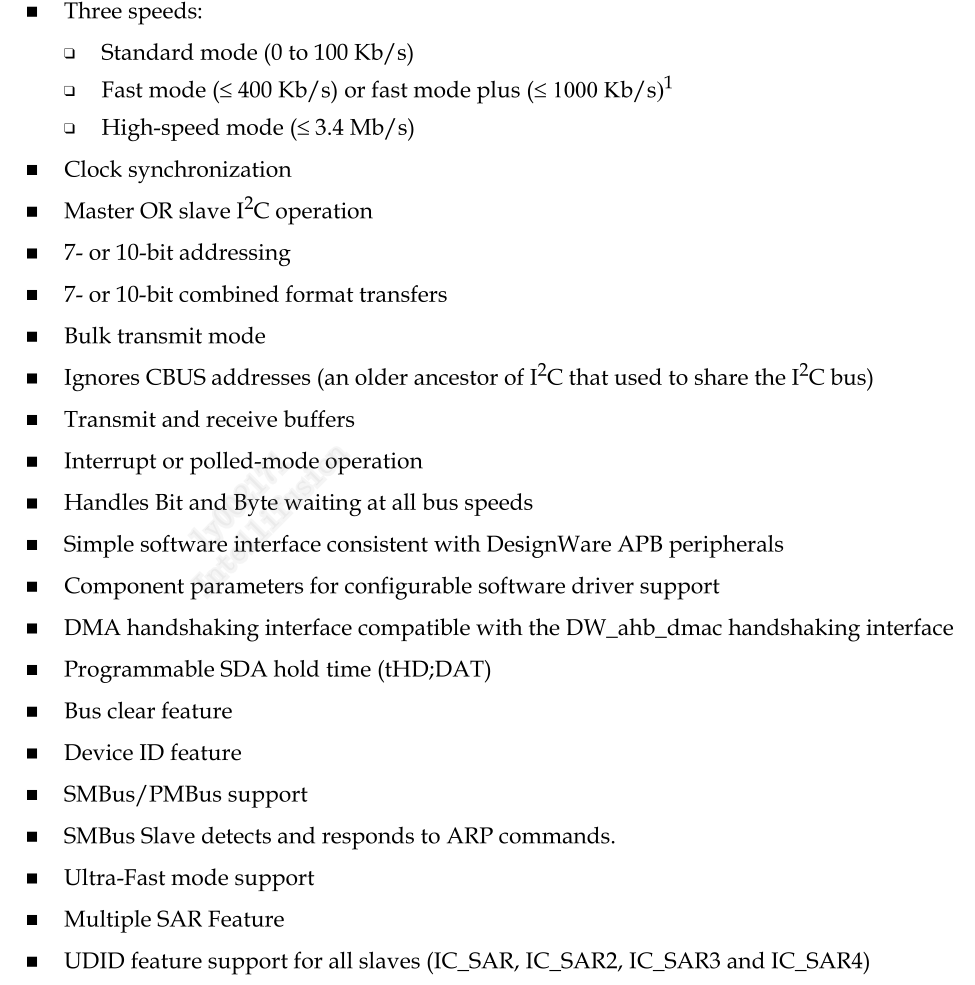
大多数的features都比较boring,我们来看这几个有趣的:
Clock synchronization
时钟同步机制,用于多主机环境下,当多个主机同时驱动 SCL 时,控制器能自动同步时钟相位,避免冲突,保证总线稳定。Bulk transmit mode
批量传输模式,允许控制器连续发送多个数据字节,无需软件逐字节干预,大幅提升大数据块传输效率,减少 CPU 占用。Handles Bit and Byte waiting at all bus speeds
在所有总线速率下,都能正确处理位等待和字节等待,兼容**从机的时钟拉伸(Clock Stretching)**和 ACK/NACK 响应,保证协议合规。Programmable SDA hold time (tHD;DAT)
SDA 数据保持时间(tHD;DAT)可通过软件编程配置,用于适配不同从机的时序要求,提升总线兼容性,尤其在长走线或负载较重的场景下。Bus clear feature
总线清除功能。当总线因异常(如从机未释放 SDA/SCL)导致死锁时,控制器可通过软件触发此功能,强制释放总线,恢复通信,避免系统卡死。
这个feature有意思,I2C控制器内部实现了计数器,软件需要提前配置timeout超时值,硬件帮助检测SCL被拉低的时间。
如果I2C控制器作为从机 —> 超时后I2C从机自动强制释放SCL
如果I2C控制器作为主机 —> 超时 —> 产生SCL_STUCK_TIMEOUT –> isr里执行abort(IC_ENABLE[1]) –> 终止当前传输,总线上产生STOP条件,释放总线,回到IDLE状态
- Ultra-Fast mode support
支持超快速模式(Ultra-Fast mode),这是一种单向、高速的 I²C 扩展模式,最高速率可达 5 Mbps,适用于单向大量数据传输(如 LED 控制、传感器数据推送)。
I2C Protocals
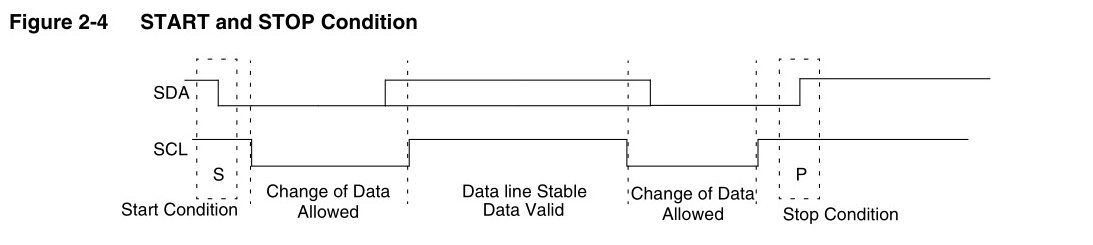
START Condition and STOP Condition
有关起始信号和终止信号,已经讲了很多了。主机要重新开始一次操作,需要发送STOP
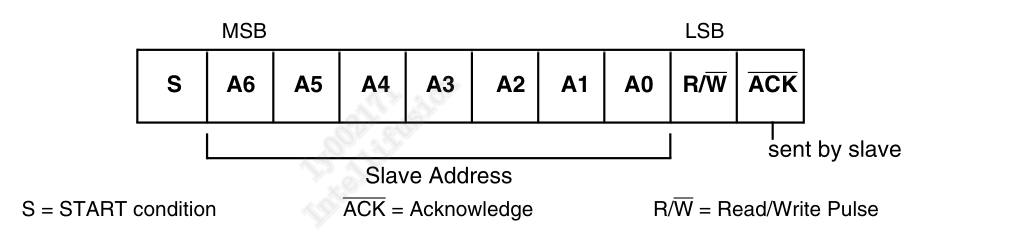
寻址从机
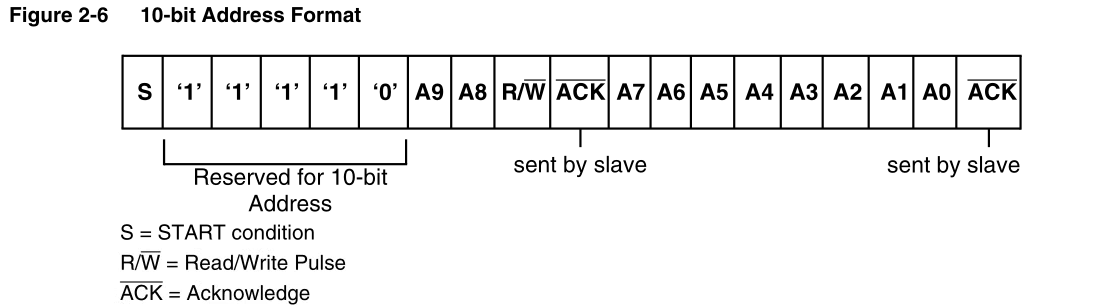
7bit和10bit地址格式支持
这里没什么东西,7bit地址总是先发送高bit,再发送低bit,读写位最后发
10bit地址,需要发两个byte,第一个byte向从机指示这个地址是10bit地址(也可用作SMBus命令)
bit[7:3] = 0b11110
bit[2:0] = A9 A8 R/W
第一个BTYE发送后,从机给一个ACK
然后发送第二个byte,也就是地址低位 A7 - A0
第一个byte的含义对应表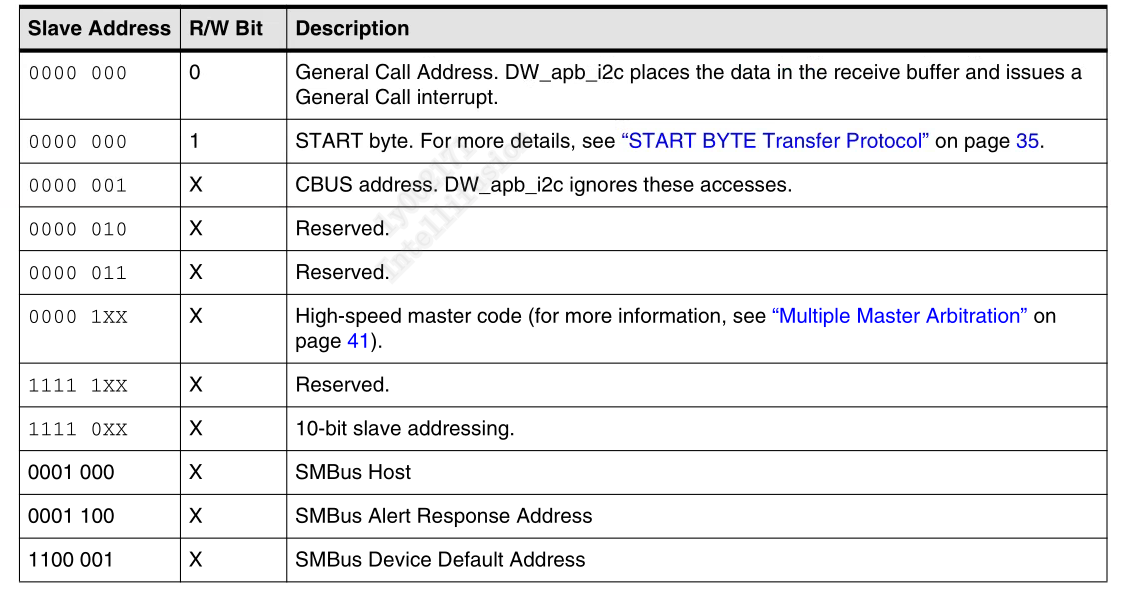
Transmitting and Receving Protocal
主从机角色和职责:
- 主机(Master)的角色
唯一发起者:只有主机能主动发起一次总线传输(包括 START 条件、地址、读写命令等),从机永远不能主动发起通信。
两种传输角色:
Master-transmitter(主机发送器):主机向总线发送数据(例如向从机写数据)。
Master-receiver(主机接收器):主机从总线接收数据(例如从从机读数据)。 - 从机(Slave)的角色
被动响应者:从机只能等待主机的寻址和命令,不能主动发起传输。
两种传输角色:
Slave-transmitter(从机发送器):当主机对从机执行 “读操作” 时,从机向总线发送数据。
Slave-receiver(从机接收器):当主机对从机执行 “写操作” 时,从机从总线接收数据。
总结
主机决定 “说什么、什么时候说”,并可以作为发送方或接收方。
从机只在被主机点名时响应,并根据主机的读写命令,决定自己是发送还是接收。
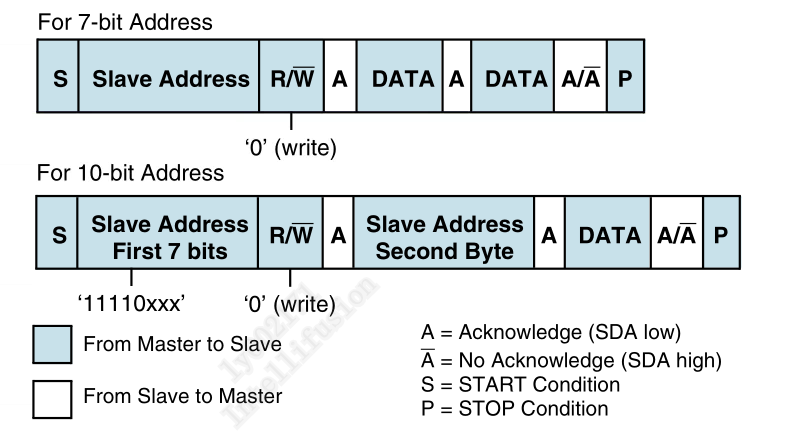
Master-Transmitter and Slave-Receiver
介绍主机发送,从机接受的时序。这个没什么好说的。
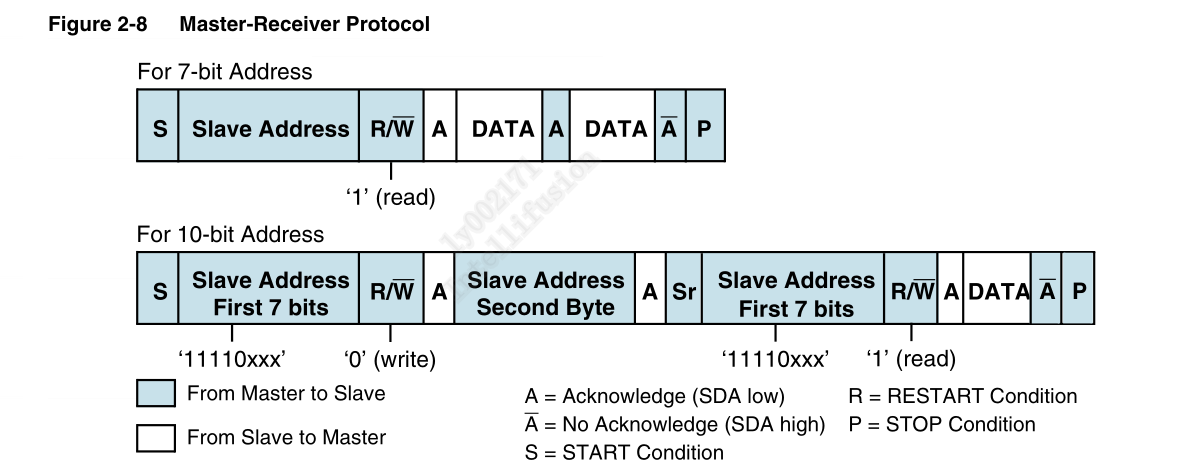
Master-Receiver and Slave-Transmitter
介绍主机接受,从机发送的时序
这里有些细节:
- 主机收到最后一个byte后发送NACK,从机检测到这个NACK后,必须交出bus(SDA的控制权),主机才能发送STOP信号
- 主机连续读/写情况下都不需要将总线交出去,读写交替时除外。一般一次传输包括start,地址,值,ACK,stop。如果要切换读写,必须先STOP,再次START。RESTART信号可以优化这个情况,主机无需STOP,直接在从机的ACK之后,发送一个RESTART,开启新的事务。
START BYTE
START BYTE Transfer Protocol主要是为了兼容那些片上没有专用I2C硬件模块的系统而设计的。
- 当 DW_apb_i2c 作为从机时,它会以最高支持的速度采样总线,避免错过 START BYTE 传输。
- 当它作为主机时,会在每次传输开始时生成 START BYTE,以兼容需要它的从机设备。
START BYTE的结构是一个固定的8位序列:
1 | 0000 0001 |
7 个连续的 0,后面跟着一个 1
这样设计的目的是:
- 让轮询总线的处理器(没有专用硬件的微控制器)可以用较低的采样率(欠采样)来检测地址阶段。
- 一旦检测到第一个 0,它就会切换到主机的正确采样速率,以保证后续通信的准确性。
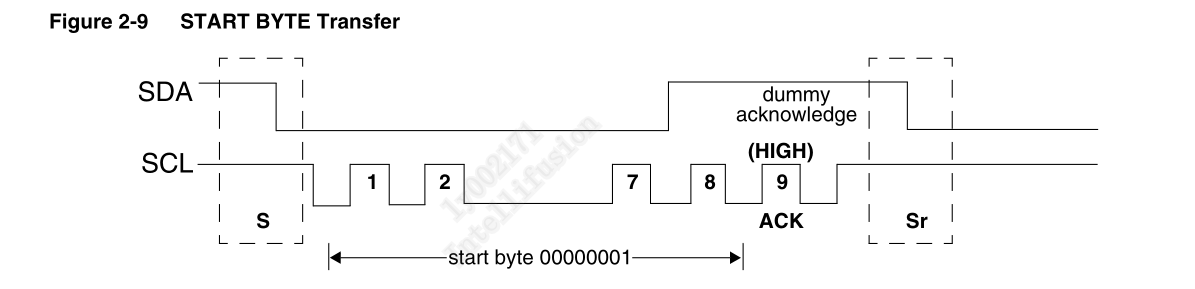
时序解析:
- S (START Condition)
主机拉低 SDA,同时 SCL 保持高电平,产生 I²C 标准的 START 条件。 - START Byte (0000 0001)
在 SCL 的 8 个时钟脉冲下,主机依次发送 7 个 0 和 1 个 1。
图中标注的 1 到 8 代表这 8 个数据位的传输。 - Dummy ACK (第 9 个时钟)
主机产生第 9 个 SCL 脉冲,这是为了符合 I²C 的字节传输格式。
但这是一个 “虚拟应答”(dummy acknowledge):没有从机拉低 SDA 来产生 ACK 信号,所以 SDA 保持高电平(HIGH)。 - Sr (RESTART Condition)
主机再次产生一个 RESTART 条件,为后续的正常 I²C 传输做准备。
- 硬件接收器不响应 START BYTE:因为它是一个保留地址,并且在 RESTART 条件产生后会自动复位。
- 主要作用:让没有专用 I²C 硬件的微控制器(纯软件模拟 I²C)能够正确同步到总线速率,从而参与后续的通信。
没有专用I2C硬件的控制器,如何通过START BYTE实现总线速率同步?
主机发送:START条件 → 开始发 Start Byte(第一位是0),低端从机此时采样到连续的低电平,开启定时器/或者其他方式,计算时间。直到START BYTE的最后一个bit的高电平到来,低端从机结束时间计算,获取到前7个低电平时钟周期的耗时,比如每个SCL时钟周期=10us,那么主机I2C速率约等于100Kbps(标准速率)
I2C Tx FIFO Management
IC_EMPTYFIFO_HOLD_MASTER_EN配置决定了当Tx FIFO变为空时,控制器是否会保持总线占用,是否主动结束当前传输。
除此之外,IC_EMPTYFIFO_HOLD_MASTER_EN配置还决定IC_DATA_CMD的构造。
IC_EMPTYFIFO_HOLD_MASTER_EN = 0
Tx FIFO 为空时:
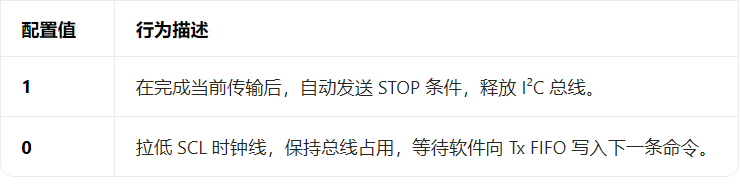
- 主机发送器:在当前字节传输完成后,自动生成 STOP 条件 结束传输。
- 如果支持 RESTART:当传输方向(读 / 写)切换时,生成 RESTART;不支持 RESTART 时,则生成 STOP + START。
IC_DATA_CMD寄存器结构:

CMD(第 8 位):只写,决定传输类型
- CMD = 1 → 读操作(Read)
- CMD = 0 → 写操作(Write)
DATA(第 0-7 位):读写数据区 - 读操作:从从机读取的数据从这里读出
- 写操作:要发送给从机的数据写入这里
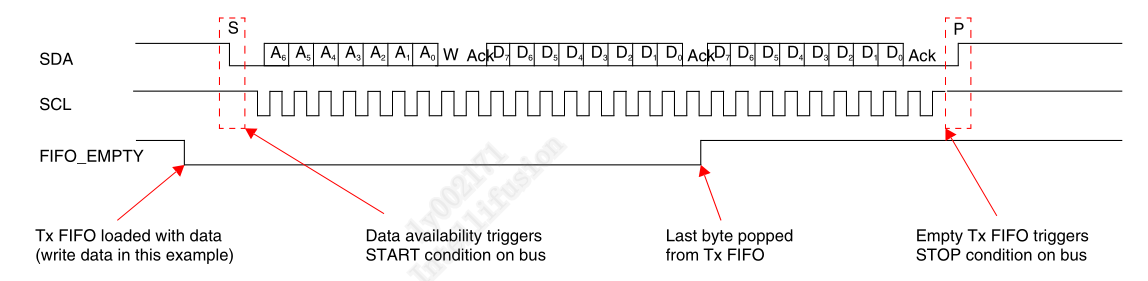
主机发送器(Master Transmitter)时序
- Tx FIFO 加载数据:软件向 Tx FIFO 写入要发送的数据(CMD=0)。
- 触发 START:FIFO 有数据后,控制器自动在总线上产生 START 条件,开始传输。
- 数据传输:依次发送从机地址 + 写位(W)+ 数据字节,每个字节后跟随 ACK。
- Tx FIFO 变空:当最后一个字节被弹出(popped)后,Tx FIFO 为空。
- 生成 STOP:Tx FIFO 为空触发控制器在总线上生成 STOP 条件,结束传输。
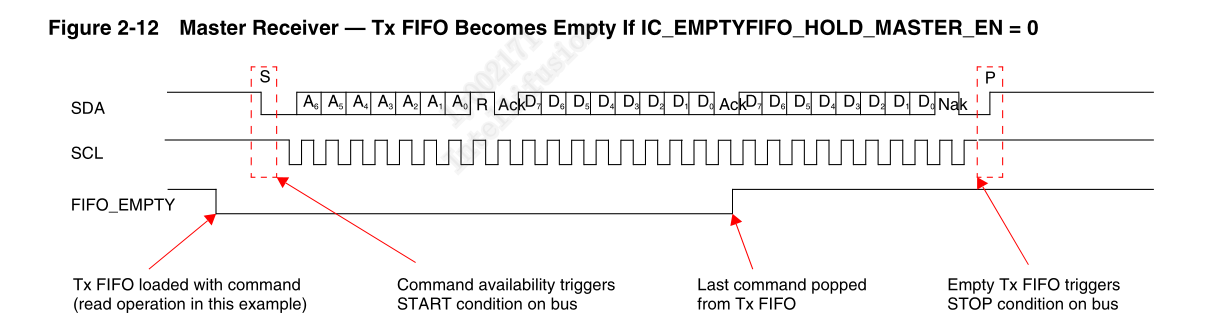
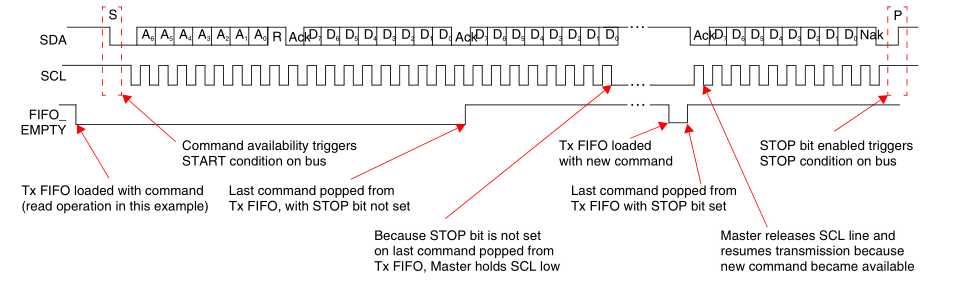
主机接收器(Master Receiver)时序
- Tx FIFO 加载命令:软件向 Tx FIFO 写入读命令(CMD=1)。
- 触发 START:FIFO 有命令后,控制器自动产生 START 条件。
- 数据传输:发送从机地址 + 读位(R),然后依次读取数据字节,最后发送 NAK。
- Tx FIFO 变空:最后一个读命令被弹出后,Tx FIFO 为空。
- 生成 STOP:Tx FIFO 为空触发控制器生成 STOP 条件,结束传输。
特殊case
当同时满足:
- IC_EMPTYFIFO_HOLD_MASTER_EN = 0
- TX_EMPTY_CTRL = 1
- TX_THLD = 0 (TX FIFO水线,一旦FIFO中剩余数据<TX_THLD,立即产生中断)
会出现以下行为:
- 一个包含多个命令的 I²C 帧,会被拆分成多个帧。
- 原因:DW_apb_i2c 在每段数据发送结束后,都会产生一个 TX_EMPTY 中断。
- 软件会在每次中断时,才向空的 Tx FIFO(TX_THLD=0)中推入新数据,导致传输被打断成多个独立的帧。
TX_THLD = 0,TX FIFO里数据为0时才产生中断,此时控制器已经发送了STOP信号出去,TX中断里开始补充数据,晚了,STOP都发出去了,重新开始发START吧,这就导致每个byte的数据都是单独的一帧。
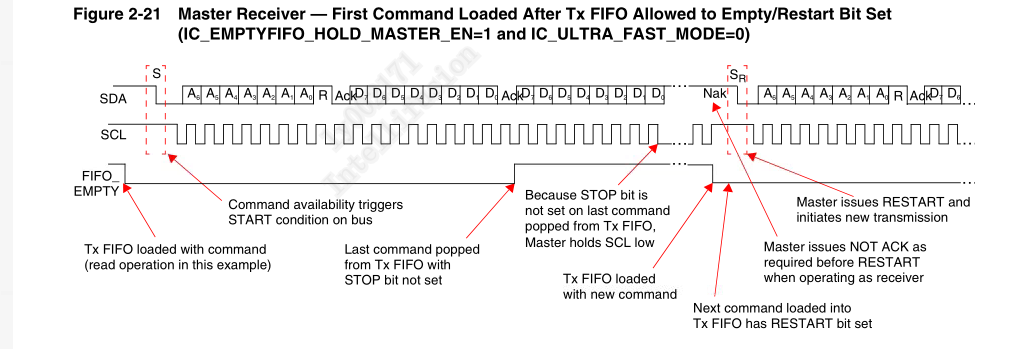
IC_EMPTYFIFO_HOLD_MASTER_EN = 1
Tx FIFO 为空时:
- 主机发送器:在当前字节传输完成后,不生成 STOP 条件,不结束传输,(SCL clock stretching),
Stalling Bus等Tx FIFO有新的数据到来。 - 如果要生成STOP信号,只有当最后一个弹出的字节,且必须特别指定STOP bit为1在IC_DATA_CMD寄存器中
IC_DATA_CMD寄存器结构:
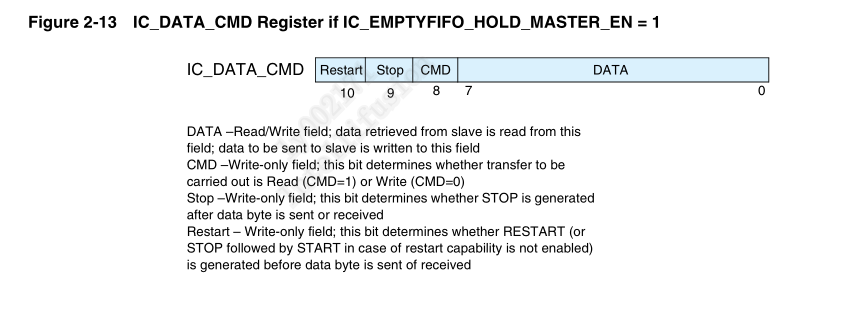
RESTART(第 10 位):只写,决定是否生成restart信号(当然前提得支持restart)
STOP (第 9 位):只写,决定是否数据发送/接受后生成stop信号
CMD(第 8 位):只写,决定传输类型
- CMD = 1 → 读操作(Read)
- CMD = 0 → 写操作(Write)
DATA(第 0-7 位):读写数据区 - 读操作:从从机读取的数据从这里读出
- 写操作:要发送给从机的数据写入这里
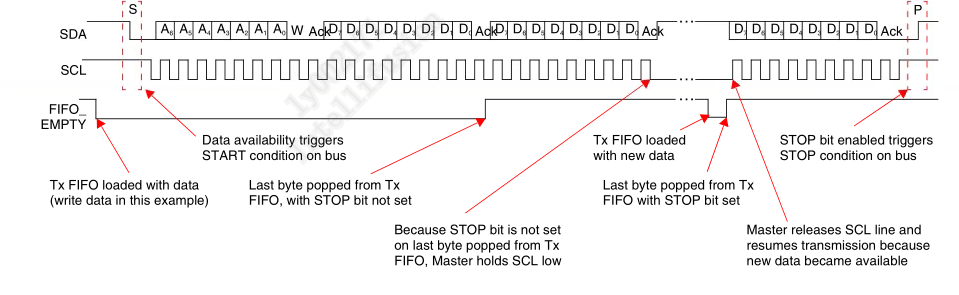
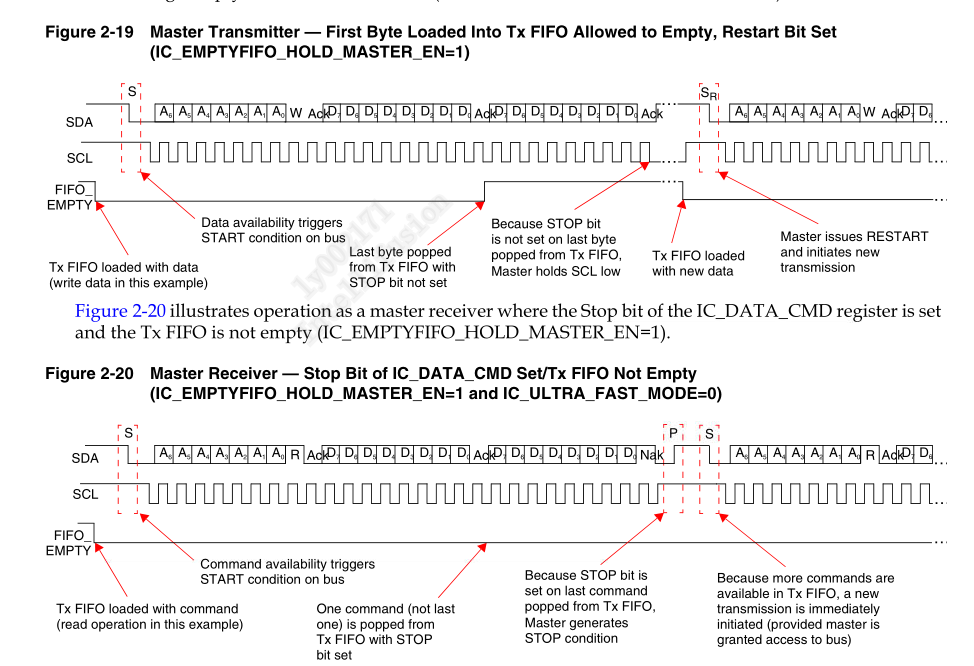
主机发送器(Master Transmitter)时序
发送最后一个data,不带stop bit,最后一个data被pop出去时,主机会hold scl为低,等到Tx FIFO被新的数据填充,开启新的数据帧。
最后一个data带stop bit,主机才会主动释放SCL。新的数据到来时再恢复传输。
主机可以主动触发stop condition,通过在IC_CMD_DATA的stop bit置位。
主机接收器(Master Receiver)时序
FIFO 空但 STOP 位未设置:最后一个读命令弹出,FIFO 为空。STOP 位未设置 → 控制器拉低 SCL,保持总线。
软件重新填充 FIFO:写入新的读命令。
恢复传输:SCL 释放,继续读取数据。
STOP 位设置时:最后一个命令带有 STOP 位 → 生成 STOP,结束传输。
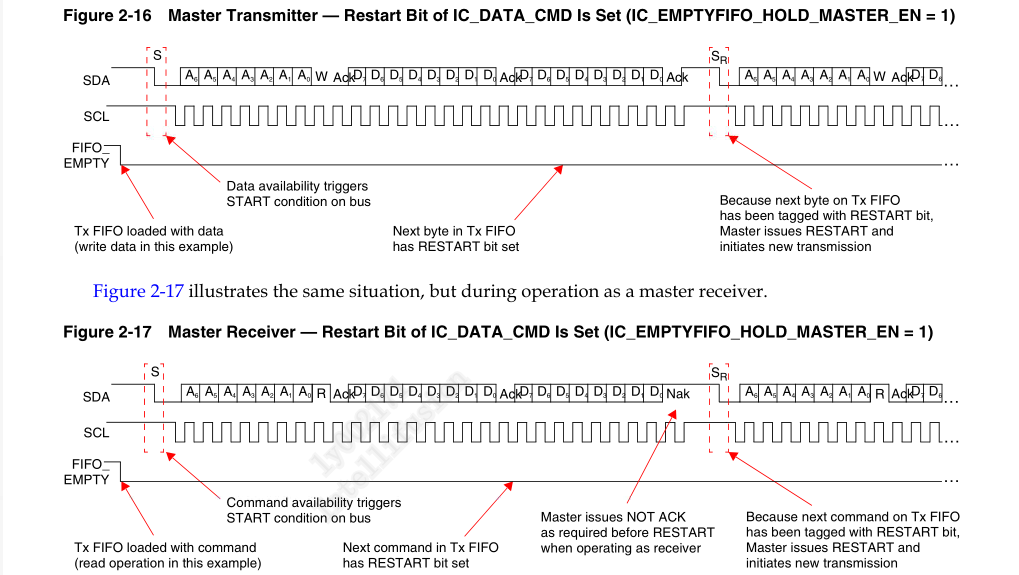
RESTART 条件生成
当 IC_DATA_CMD 寄存器的第 10 位(Restart)= 1,且 IC_RESTART_EN = 1 时:
- 发送器:
- 下一个要弹出的字节被标记了 RESTART 位。
- 当前字节传输完成后,控制器生成 RESTART(Sr),而不是 STOP。
- 然后立即开始新的传输(地址 + W + 数据)。
- 如果 FIFO 先空了,会先拉低 SCL,等新数据加载后再发 RESTART。
- 接收器:
- 作为接收器,在 RESTART 前必须先发送 NACK。
- 然后生成 RESTART,开始新的读传输(地址 + R + 数据)。
- 若 FIFO 空,先拉低 SCL,等新命令加载后再执行 RESTART。
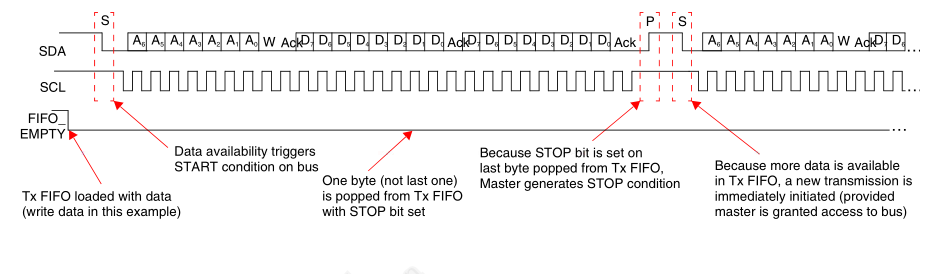
STOP 位强制结束
即使 Tx FIFO 还有数据,只要最后一个弹出的字节 / 命令设置了 STOP 位:
- 控制器会在该字节 / 命令传输完成后,立即生成 STOP 条件。
- 即使 FIFO 中还有剩余数据,传输也会被强制结束。
- 如果之后 FIFO 又有新数据,控制器会重新发起 START,开始新的传输。
IC_EMPTYFIFO_HOLD_MASTER_EN 配置差异

multiple master arbitration
TODO
clock synchronization
TODO
I2C Operation Mode
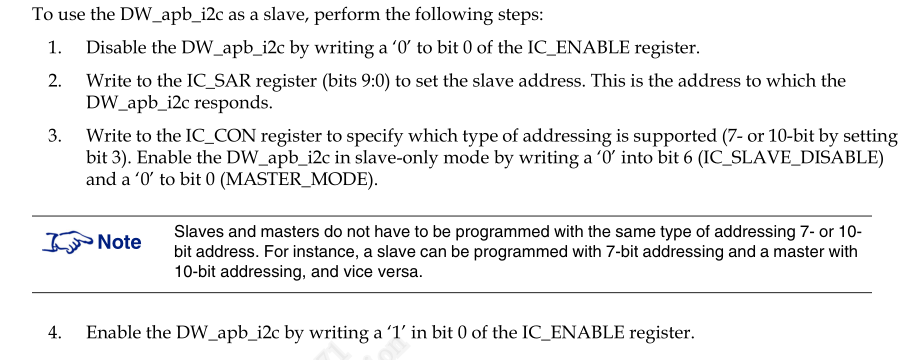
Slave Mode
Slave Initiate
Slave-Transmitter Operation for Single Byte
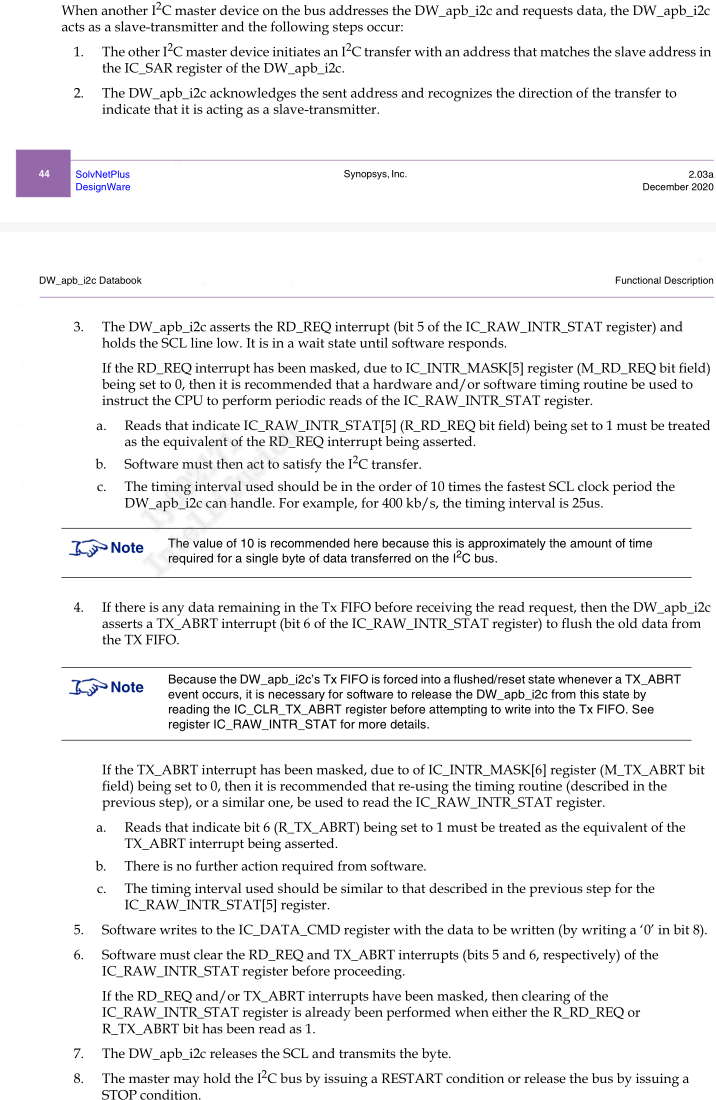
总结从机单字节操作的流程图
核心为两个中断:
- RD_REQ
- TX_ABRT
1 | flowchart TD |
从机可以主动拉低SCL,发送完数据后release总线。
Slave-Receiver Operation for Single Byte
1 | flowchart TD |
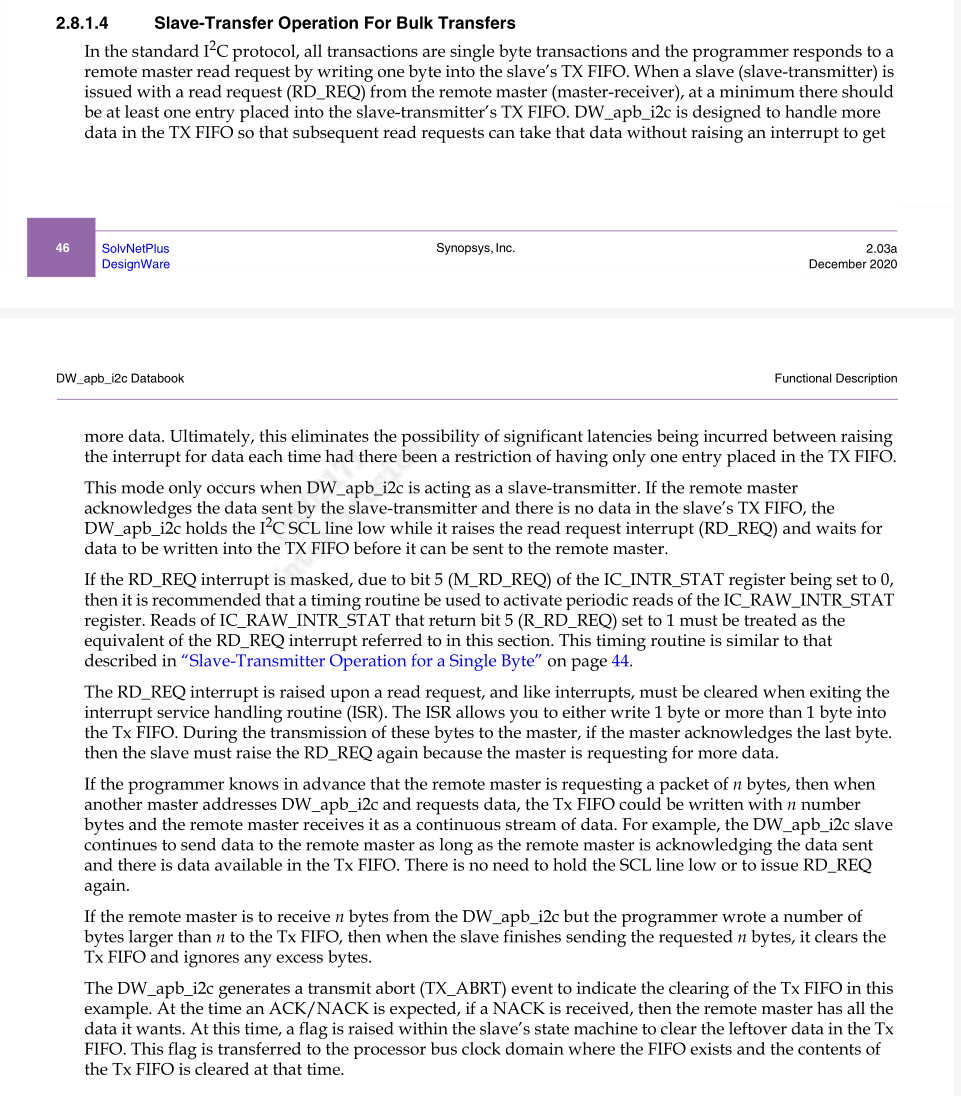
Slave Transfer Operation for Bulk Transfers
- 批量传输的核心设计思想
在标准 I²C 协议中,单次读请求通常只传输一个字节,这会导致频繁的中断开销。DW_apb_i2c 支持批量传输模式,允许软件预先将多个字节写入 TX FIFO,然后在一次传输中连续发送,从而消除了每次数据传输都触发中断的延迟。 - 关键操作与状态处理
读请求触发(RD_REQ):
当远程主机向从机发起读请求时,DW_apb_i2c 会产生 RD_REQ 中断(M_RD_REQ 位)。
如果 TX FIFO 为空,从机将拉低 SCL 时钟线,暂停传输,等待软件向 TX FIFO 写入数据。
如果 RD_REQ 中断被屏蔽,软件需要通过定时轮询 IC_RAW_INTR_STAT 寄存器(检查 R_RD_REQ 位)来等效处理。
批量数据填充与发送:
软件可以预先将多个字节(例如主机请求的 n 字节)一次性写入 TX FIFO。
从机在主机应答每个字节后,会自动从 TX FIFO 中取出下一个字节发送,无需软件干预。
当主机确认接收最后一个字节后,如果还需要更多数据,从机会再次触发 RD_REQ 中断。
数据长度不匹配的处理:
如果写入 TX FIFO 的字节数多于主机请求的 n 字节:从机发送完 n 字节后,会清空 TX FIFO 并忽略多余字节,同时产生 TX_ABRT(发送中止)事件。
如果写入 TX FIFO 的字节数少于主机请求的 n 字节:从机发送完 FIFO 中的数据后,会拉低 SCL 线,等待软件补充数据。
ACK/NACK 与 FIFO 清空:
当主机接收到所有需要的数据并返回 NACK 时,从机状态机中的标志位会被置位,触发 TX FIFO 的清空操作,以清除残留数据。
总结流程图:
1 | flowchart TD |
Master Mode
主机模式下有个很重要的配置参数: I2C_DYNAMIC_TAR_UPDATE
决定了主机模式下目标地址(TAR)和传输参数的更新时机

I2C_DYNAMIC_TAR_UPDATE = 0
I2C_DYNAMIC_TAR_UPDATE = 1
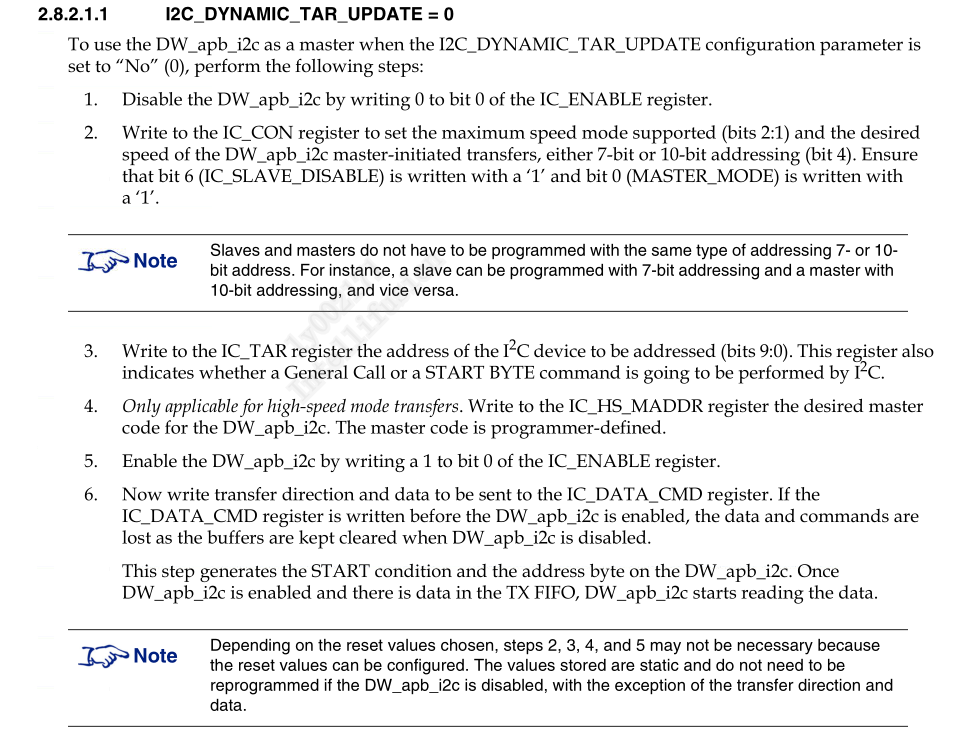
I2C_DYNAMIC_TAR_UPDATE = 0(静态模式)
禁用控制器:向 IC_ENABLE[0] 写入 0,关闭 DW_apb_i2c。
配置控制寄存器:
写入 IC_CON:设置最大速度模式(bits 2:1)、地址模式(7/10-bit,bit 4)。
必须确保 IC_SLAVE_DISABLE (bit 6) = 1 和 MASTER_MODE (bit 0) = 1,使设备作为主机工作。
设置目标地址:写入 IC_TAR,指定要访问的从机地址(bits 9:0),并指示是否为通用呼叫或 START BYTE 命令。
高速模式配置(可选):若使用高速模式,写入 IC_HS_MADDR 寄存器设置主机码。
启用控制器:向 IC_ENABLE[0] 写入 1,使能 DW_apb_i2c。
发起传输:向 IC_DATA_CMD 寄存器写入传输方向和数据,生成 START 条件并开始传输。
注:此模式下,若要访问新的从机地址,必须重复步骤 1-6,即先禁用、重配置、再启用。I2C_DYNAMIC_TAR_UPDATE = 1(动态模式)
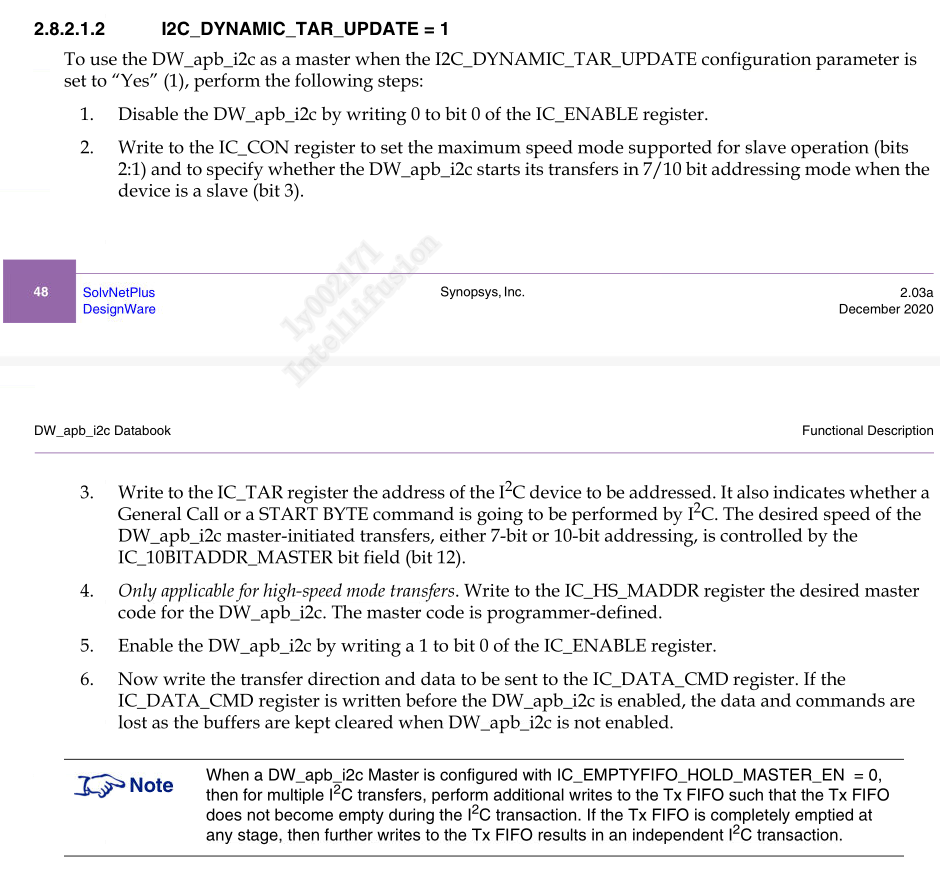
禁用控制器(初始化阶段):向 IC_ENABLE[0] 写入 0,关闭 DW_apb_i2c。
配置控制寄存器:
写入 IC_CON:设置从机操作的最大速度模式(bits 2:1)和从机地址模式(bit 3)。
主机的地址模式(7/10-bit)由 IC_10BITADDR_MASTER (bit 12) 控制,可动态修改。
设置目标地址:写入 IC_TAR,指定要访问的从机地址。传输速度和地址模式可在运行中通过 IC_10BITADDR_MASTER 动态调整。
高速模式配置(可选):若使用高速模式,写入 IC_HS_MADDR 寄存器设置主机码。
启用控制器:向 IC_ENABLE[0] 写入 1,使能 DW_apb_i2c。
发起传输:向 IC_DATA_CMD 寄存器写入传输方向和数据。如需切换目标地址,可直接写入新的 IC_TAR,无需禁用控制器,即可发起新的 I²C 事务。
注:此模式下,当 IC_EMPTYFIFO_HOLD_MASTER_EN = 0 时,可连续执行多笔传输;若 Tx FIFO 被清空,后续写入将自动开启新的独立事务。

Master Transmit / Master Receive 动态切换机制
这里主要介绍 DW_apb_i2c 作为主机时,如何在发送(写)和接收(读)操作之间动态切换,以及 Tx FIFO 空时的两种总线行为策略。
- 动态读写切换的核心机制
数据与命令写入:- 所有传输命令(读 / 写)和数据都通过同一个寄存器 IC_DATA_CMD 下发。
- 写操作(Transmit):向 IC_DATA_CMD[7:0] 写入要发送的数据,并将 CMD bit[8] 置为 0。
- 读操作(Receive):向 IC_DATA_CMD[7:0] 写入任意值(don’t care),并将 CMD bit[8] 置为 1。
连续传输:
只要 Tx FIFO 中还有未处理的命令,DW_apb_i2c 就会持续发起 I²C 传输,自动在读写操作之间切换。
- Tx FIFO 空时的两种总线行为
当 Tx FIFO 为空时,主机的行为由 IC_EMPTYFIFO_HOLD_MASTER_EN 控制:
1 | 注: |
disabling dw_apb_i2c && procedure
在 DW_apb_i2c v1.05a 及更早版本中,软件需要同时监控 IC_STATUS 和 IC_RAW_INTR_STAT 两个寄存器,才能判断硬件是否已完全关闭。从 v2.03a 开始,新增了 IC_ENABLE_STATUS 寄存器,软件只需监控该寄存器的 IC_EN 位(bit 0),即可明确判断硬件是否已完成关闭,简化了流程。
安全禁用 && 强制中止
安全禁用条件:
只有当正在处理的命令已经设置了 STOP 位(STOP bit set to 1)时,DW_apb_i2c 主机才能被安全禁用。
如果在处理未设置 STOP 位的命令时尝试禁用,主机将继续保持活跃,拉低 SCL 线,直到 Tx FIFO 收到新命令。
强制中止(ABORT):
当 IC_EMPTYFIFO_HOLD_MASTER_EN = 1,且主机正在处理未设置 STOP 位的命令时,若需立即禁用,可通过向 IC_ENABLE[1] 写入 1 来触发 ABORT 操作,主动放弃 I²C 总线控制权,然后再执行禁用流程。
标准禁用流程
这是一个安全、可靠的软件禁用流程,确保硬件完全关闭后再继续操作:
定义轮询间隔:
设置 t_i2c_poll 为系统最高 I²C 传输速率信号周期的 10 倍。例如,400 kb/s 速率下,信号周期为 2.5 µs,t_i2c_poll = 25 µs。
定义超时参数:
设置 MAX_T_POLL_COUNT 作为最大轮询次数,若轮询超过该次数仍未完成禁用,则报告错误。
阻塞新事务:
执行阻塞逻辑,阻止软件发起新的 I²C 主机事务,但允许已挂起的传输完成。
注:若 DW_apb_i2c 仅作为从机使用,此步骤可忽略。
初始化轮询计数器:
将 POLL_COUNT 置为 0。
发起禁用请求:
向 IC_ENABLE[0] 写入 0,请求关闭 DW_apb_i2c。
轮询状态寄存器:
读取 IC_ENABLE_STATUS,检查 IC_EN 位(bit 0)。
每次读取后,POLL_COUNT 加 1。若 POLL_COUNT >= MAX_T_POLL_COUNT,则退出并返回错误码。
等待或完成:
若 IC_ENABLE_STATUS[0] = 1,则休眠 t_i2c_poll 时间,回到步骤 6 继续轮询。
若 IC_ENABLE_STATUS[0] = 0,则表示硬件已完全关闭,退出并返回成功码。
Abort transfer
ABORT 是 DW_apb_i2c 主机模式下的一个强制中止机制,用于在传输未完成时主动放弃总线控制权。
触发方式:通过向 IC_ENABLE[1] 写入 1 来发起 ABORT 请求。
硬件响应:
在 I²C 总线上发送 STOP 条件,终止当前传输。
清空 Tx FIFO,丢弃所有未执行的传输命令。
使用限制:仅在主机模式下有效,从机模式不支持 ABORT 操作。
标准中止流程(Procedure)
停止填充 Tx FIFO:软件不再向 IC_DATA_CMD 寄存器写入新的传输命令。
禁用 DMA(可选):如果系统工作在 DMA 模式下,需将 TDMAE 置为 0,关闭发送 DMA。
发起 ABORT:向 IC_ENABLE[1] 写入 1,触发中止操作。
等待中断:等待 M_TX_ABRT 中断触发,表明硬件已完成中止。
检查中止源:读取 IC_TX_ABRT_SOURCE 寄存器,确认中止原因为 ABRT_USER_ABRT(即软件主动发起的 ABORT)。
毛刺抑制
I²C 总线(开漏信号)在长线传输、上拉电阻、噪声干扰下,SCL/SDA 可能出现很短的毛刺(glitch)。如果这些毛刺被内部采样到,会导致:
- 误判 START/STOP
- 误读 bit
- 协议崩溃
毛刺抑制就是用计数器过滤掉这些短毛刺,只保留 “稳定超过一定时间” 的信号。
I2C控制器的毛刺抑制的工作原理是为 SCL 和 SDA 分别提供独立的计数器。
规则如下:
- 计数器启动条件
只要输入信号(SCL/SDA)发生跳变,计数器就从 0 开始计数。 - 两种关键行为
- 情况 A:信号稳定(成功滤波)
如果输入信号在计数器达到 计数上限(SPKLEN) 前一直不变:
内部采样信号更新为当前值
计数器复位并停止
→ 这个信号被 “确认”,毛刺被过滤掉。 - 情况 B:信号再次跳变(毛刺被滤除)
如果信号在计数到上限前再次跳变:
计数器复位并停止
内部信号不更新
这次毛刺被忽略
→ 短噪声不会破坏协议。
- 情况 A:信号稳定(成功滤波)
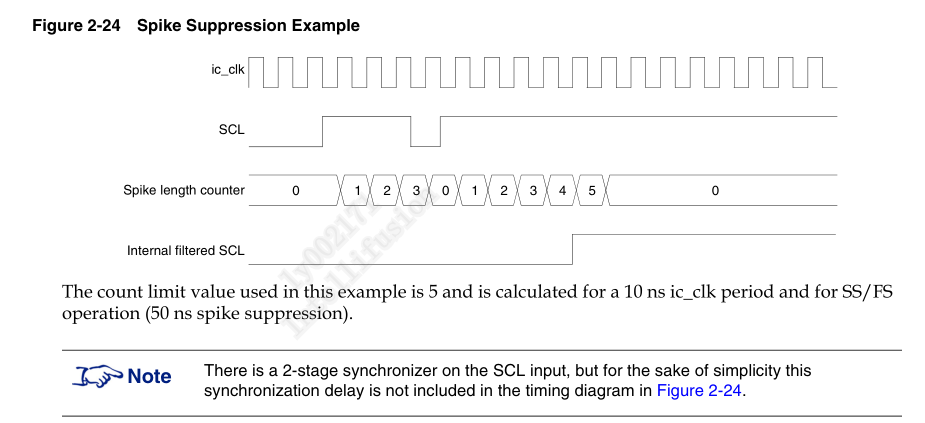
毛刺抑制案例
第一个SCL跳变,历经2个周期又跳回来。计数器在第一次跳变开始工作,假设count limit是5,ic_clk周期为10ns,毛刺移植时长为50ns。第一段小毛刺约为20-30ns,不更新内部信号。
第二段>50ns,计数器到5,更新内部信号。
三个关键 SPKLEN 寄存器
I²C 不同模式要求不同最大毛刺长度:
- SS/FS:50 ns
- HS:10 ns
- UFm:10 ns
因此需要三个寄存器: - IC_FS_SPKLEN(SS/FS)
- IC_HS_SPKLEN(HS)
- IC_UFM_SPKLEN(UFm)
注意:
它们 互斥不共存
高速模式和超高速模式不能同时使用
不同模式自动使用不同寄存器
注意:
DW_apb_i2c 的毛刺抑制讲解内容核心是:
- 使用计数器过滤 SCL/SDA 短毛刺
- 信号稳定超过 SPKLEN 时间才更新内部信号
- 用三个 SPKLEN 寄存器分别支持 SS/FS/HS/UFm 模式
- 寄存器最小值是 1,且必须在禁用控制器时写入
- 内部逻辑会增加固定时钟周期开销,因此 LCNT/HCNT 有最小值约束
Fast Mode
TODO:
- 配置速率模式寄存器
- 配置ic_clk大于等于32MHz
- 配置IC_CON寄存器,切换fast mode或者fast mode plus
- 配置IC_FS_SCL_LCNT和IC_FS_SCL_HCNT寄存器,迎合fast mode plus的SCL
- 编程IC_FS_SPKLEN寄存器,配置最大毛刺抑制时间
- 编程IC_SDA_SETUP寄存器,满足最小数据建立时间 (tSU; DAT)
Bus Clear
Bus Clear 是 DWC_apb_i2c 提供的总线故障恢复机制,专门用于处理 SDA 或 SCL 线被意外拉低(stuck at LOW) 的异常场景,避免总线永久死锁。
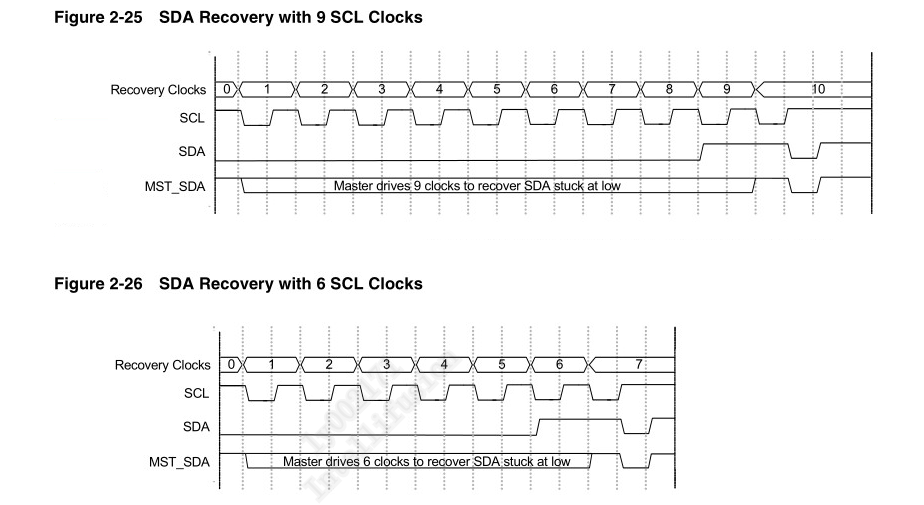
二、SDA Line Stuck at LOW Recovery(SDA 线被拉低的恢复)
当 SDA 线被意外拉低时,主机通过主动发送时钟脉冲来尝试恢复:
尝试恢复:
主机最多发送 9 个 SCL 时钟脉冲,同时尝试将 SDA 线驱动为高电平,检查是否恢复。
实际发送的时钟数取决于从机还需发送的位数(最大为 9 位,因此最多 9 个时钟)。
如果在 9 个时钟内 SDA 恢复为高电平,主机发送 STOP 条件,释放总线。
如果第 9 个时钟后 SDA 仍为低电平,则需要硬件复位。
时序示例:
主机发送 9 个 SCL 时钟,最终成功将 SDA 拉高。
从机剩余 6 位数据,因此主机仅发送 6 个 SCL 时钟,SDA 即恢复。
三、SCL Line is Stuck at LOW(SCL 线被拉低)
当 SCL 线被意外拉低时,由于时钟是通信的同步基准,没有有效的软件恢复手段:
唯一解决方案:必须通过硬件复位信号来重置整个 I²C 总线,才能恢复通信。
这是因为 SCL 被拉低后,主机无法产生时钟,整个总线协议无法继续运行。
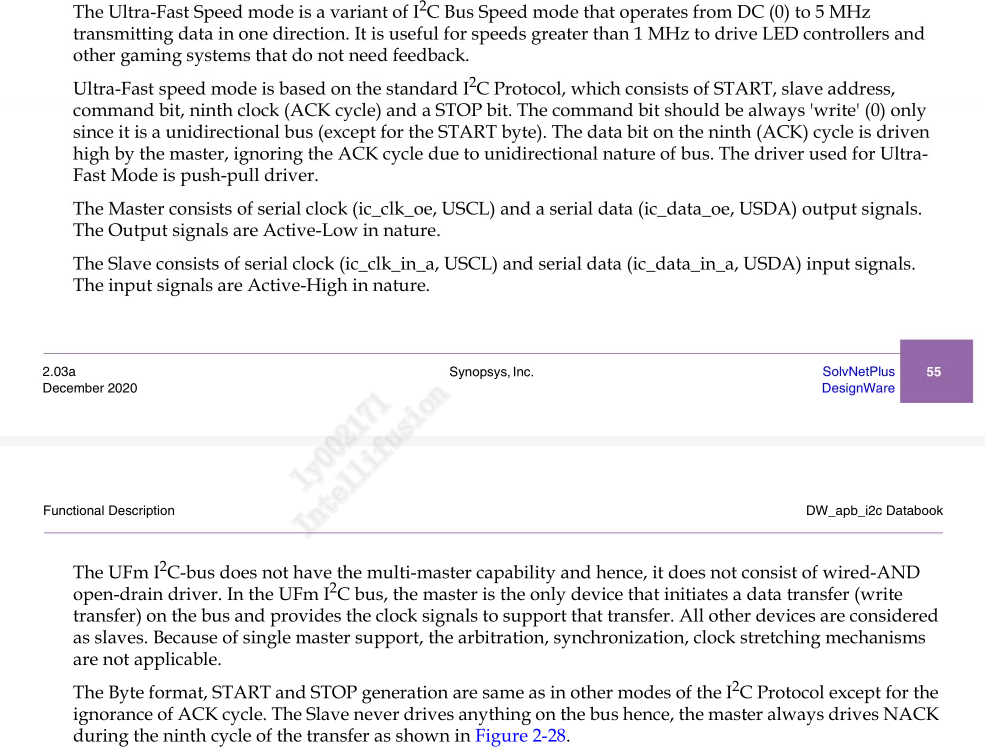
Ultra-Fast MODE
Ultra-Fast Mode 是 I²C 协议的一个高速变种,专为单向、无反馈的高速传输设计:
速率范围:DC (0) ~ 5 MHz
典型应用:驱动 LED 控制器、游戏外设等不需要从机应答的场景
与标准 I²C 相比,UFm 有以下核心区别:
- 单向传输:
仅支持主机向从机的 “写” 操作(命令位固定为 0),不支持读操作。
第 9 个时钟(ACK 周期)由主机主动驱动为高电平,忽略从机的应答,本质上是强制 NACK。
从机永远不会在总线上驱动任何信号。 - 电气特性:
使用推挽式(push-pull)驱动器,而非标准 I²C 的开漏(open-drain)驱动器。
主机输出信号(USCL、USDA)为低电平有效(Active-Low)。
从机输入信号为高电平有效(Active-High)。 - 总线拓扑:
无多主机支持:主机是唯一的总线发起者,不存在仲裁、同步或时钟拉伸机制。
所有其他设备均为从机,仅接收数据。 - 帧格式:
START、STOP 条件的生成方式与标准模式一致。
唯一的区别是第 9 个时钟周期,主机强制发送 NACK。
IC_CLK Frequence Configuration
当 DW_apb_i2c 作为主机时,必须根据工作模式配置对应的 *CNT 寄存器,以生成符合 I²C 规范的 SCL 时钟高低电平周期,确保 I/O 时序正确

当 DW_apb_i2c 仅作为从机时,无需配置这些 *CNT 寄存器,因为从机不主动生成 SCL 时钟。
关键的时序约束:
- 偏斜(skew)约束时序偏斜必须满足:
skew < T(SCL 低电平周期)−T(SU; DAT)
这是为了保证数据建立时间(setup time)的要求,避免采样错误。 - START/STOP/RESTART 时序总线缓冲时间(tBUF)以及 START、STOP、RESTART 条件的建立 / 保持时间,都依赖于对应模式下 *HCNT / *LCNT 寄存器的配置值。
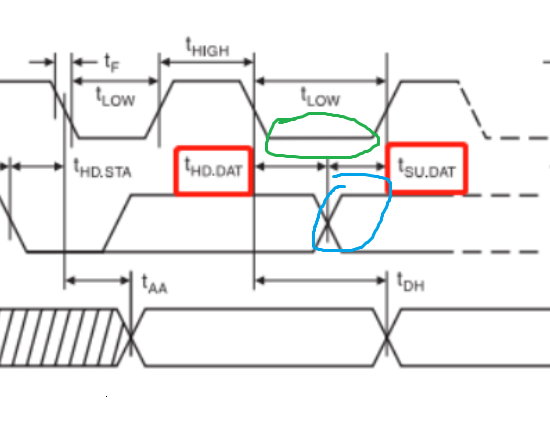
绿色部分为SCL低电平时间,蓝色部分为数据建立时间。
如果skew时间过长,skew时间+建立时间超过SCL低电平周期,则会影响SCL高电平时的采样,出现采样不稳定问题。
I2C 关键Timing参数 - *CNT 寄存器
配置哪个寄存器,能控制哪个时序的长短。
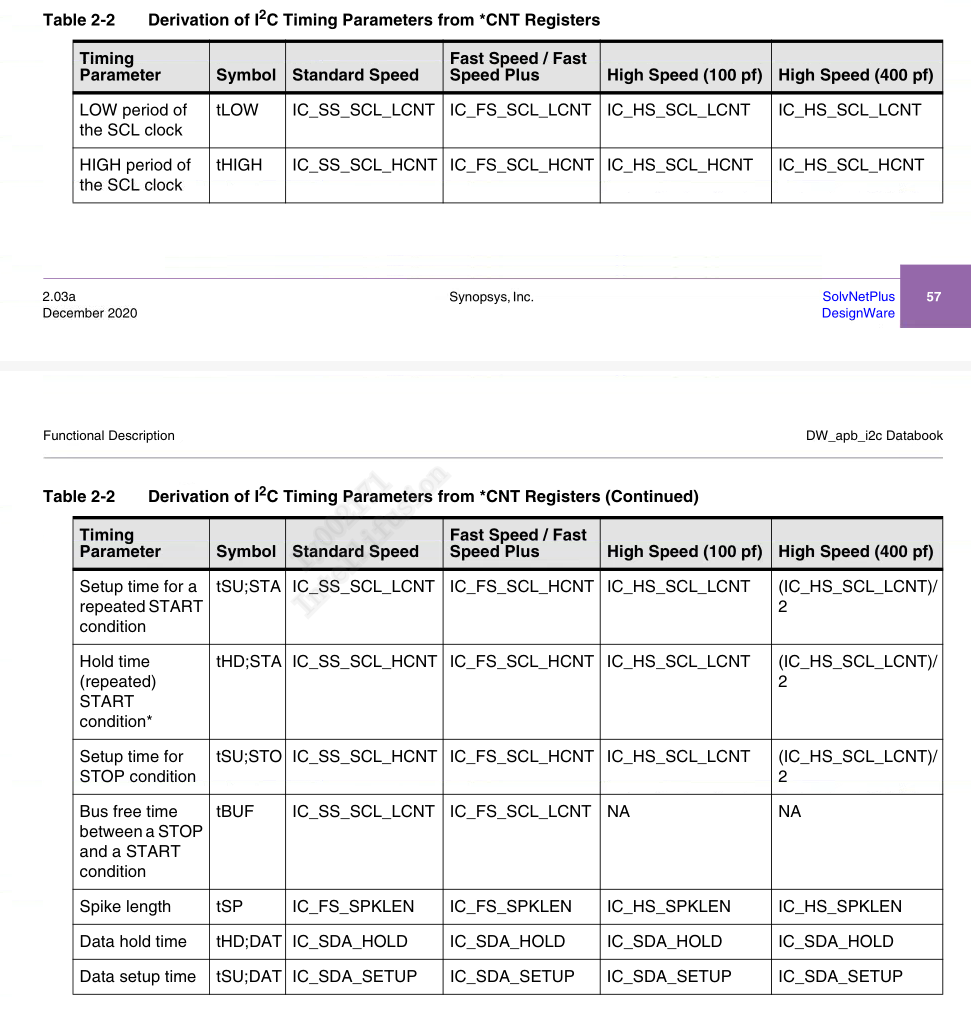

高速模式(HS)的特殊规则
注意表格中 High Speed (100 pF) 和 High Speed (400 pF) 列的特殊值:
对于 tLOW (低电平) 和 tSU;STO (建立时间):使用 IC_HS_SCL_LCNT,但除以 2。
这意味着高速模式下,SCL 低电平时间和 STOP 建立时间被减半,以支持更高的传输速率(3.4Mb/s)。
总结:工程师如何使用这张表?
定目标:我要在 400kb/s 下通信。
查表:定位到 Fast Speed / Fast Speed Plus 列。
配寄存器:
根据目标周期,计算 IC_FS_SCL_LCNT 和 IC_FS_SCL_HCNT。
根据毛刺要求,设置 IC_FS_SPKLEN
查时序:验证时,查看表中对应值,确认时序是否满足 I²C 规范。
IC_CLK_FREQ_OPTIMIZATION = 0 时 的 最小值约束
当 DW_apb_i2c 作为主机,且 IC_CLK_FREQ_OPTIMIZATION = 0 时,*LCNT / *HCNT 寄存器的最小值约束,以及实际 SCL 高低电平时间的真实计算公式。
在 SS / FS / FM+ / HS 模式下,*LCNT 和 *HCNT 不能随便写,必须满足:
- *_LCNT 寄存器值 > *_SPKLEN + 7
- *_HCNT 寄存器值 > *_SPKLEN + 5
原因: - *_LCNT + 7:SCL 下降沿后,驱动 SDA 所需的时间开销。
- *_HCNT + 5:SCL 高电平期间,采样 SDA 所需的时间开销。
若不满足最小值,会导致内部逻辑无法在规定时间内完成驱动 / 采样,破坏 I²C 时序。
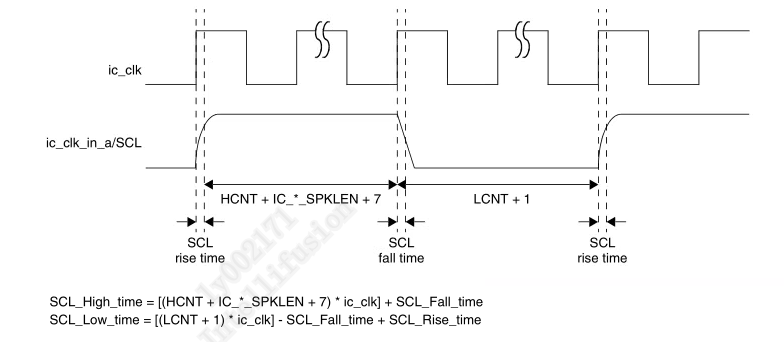
实际上SCL周期的生成逻辑
DW_apb_i2c 内部会对寄存器值做额外处理,生成真实的 SCL 高低电平:
SCL 低电平时间:
内部计数:*_LCNT + 1 个 ic_clk 周期
再加上内部逻辑延迟(约 3 个 ic_clk),最终低电平周期至少为 9 个 ic_clk 周期(7+1+1)SCL 高电平时间:
内部计数:HCNT + IC_SPKLEN + 7 个 ic_clk 周期
这包含了:计数逻辑 (*_HCNT+1)、SCL 滤波延迟 (SPKLEN+2)、以及内部逻辑延迟(约 3 个 ic_clk),最终高电平周期至少为 13 个 ic_clk 周期(6+1+3+3)
外部因素的影响:
实际 SCL 高低电平时间,还会受到外部物理因素的影响,这些是芯片本身无法控制的:
- SCL 上升时间(rise time):由上拉电阻、总线电容等决定。
- SCL 下降时间(fall time):由 IO 驱动能力、总线电容等决定。
真实的 SCL 周期计算公式:
IC_CLK_FREQ_OPTIMIZATION = 1 时 的 最小值约束
IC_CLK_FREQ_OPTIMIZATION = 1 时,DW_apb_i2c 的 SCL 时序生成逻辑被 “简化”,寄存器最小值更宽松,
对比:
= 0:严格按文档前面讲的,必须满足 SPKLEN+7、SPKLEN+5 等约束。
= 1:不再增加固定周期开销,SCL 低电平 = LCNT,高电平 = HCNT + SPKLEN + 3。
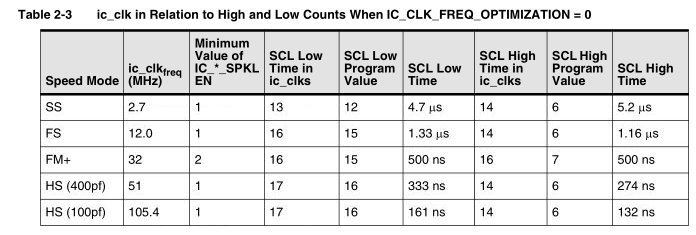
IC_CLK_FREQ_OPTIMIZATION = 0(默认,严格模式)
这是早期版本的行为,内部逻辑会多加很多固定周期,导致:SCL 低电平时间 = (LCNT + 1) × ic_clk + 内部延迟(约 3 个周期)SCL 高电平时间 = (HCNT + SPKLEN + 7) × ic_clk
因此 LCNT 必须 > SPKLEN + 7
因此 HCNT 必须 > SPKLEN + 5
特点:
寄存器值不能太小
实际时序比寄存器值大很多
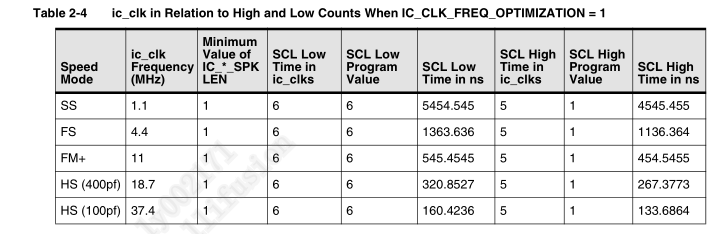
主要为了满足所有时序裕量IC_CLK_FREQ_OPTIMIZATION = 1(优化模式)
内部逻辑不再增加 “固定额外周期”,更接近直接按寄存器值生成 SCL:SCL LOW period = IC_*_LCNT × ic_clkSCL HIGH period = IC_*_HCNT × ic_clk + SPKLEN + 3
并且有严格的最小值限制:IC_*_LCNT 不能小于 6(硬件强制最小 = 6)IC_*_HCNT 不能小于 1(硬件最小 = 5 个周期:1+1+3)
特点:
配置更简单
实际时序与寄存器值更接近
不再要求 SPKLEN + 7 / SPKLEN + 5 的约束
适合高频率 I²C(如 1M、3.4M、5M)

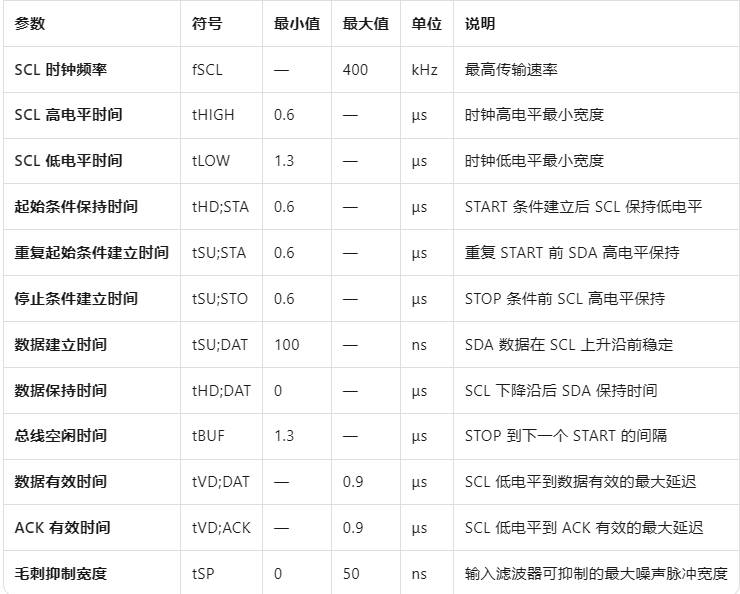
Fast Mode下的关键时序约束表格
计算案例:
ic_clk = 10MHz,目标I2C速率为800k
基础参数
ic_clk = 10 MHz → 周期 = 100 ns
目标速率 = 800 kbps
模式 = Fast Mode Plus
SPKLEN 计算(毛刺 50ns)
SPKLEN = 50ns / 100ns - 1 ≈ 0
→ 硬件最小 = 1
最终:IC_FS_SPKLEN = 1
LCNT / HCNT 计算(优化模式 =1)
SCL 低电平 ≈ 600ns
LCNT = 600 / 100 = 6
→ IC_FS_SCL_LCNT = 6
SCL 高电平 ≈ 600ns
HCNT = 600/100 - SPKLEN -3 = 6 -1 -3 = 2
→ IC_FS_SCL_HCNT = 2
这里两个600ns的来源:
从根本原因开始:800 kbps 的 SCL 周期是多少?
I²C 主机波特率 = 1 / SCL 周期
目标速率 = 800 kbpsSCL 周期 = 1 / 800,000 = 1250 ns
也就是说:整个 SCL 周期只有 1250 ns(高 + 低)
二、I²C 规范要求:高低电平必须对称
Fast Mode Plus (FM+) 规范:
SCL 高电平时间(tHIGH)≥ 600 ns
SCL 低电平时间(tLOW)≥ 600 ns
因为总周期 1250 ns,所以:
高 = 600 ns
低 = 650 ns 左右
实际最常用的配置 = 高低各 600 ns这就是为什么:
SCL 低电平 ≈ 600 ns
(而且 600 ns 是 I²C 规范的最小值底线)
最终可用配置
1 | IC_FS_SPKLEN = 1 |
dw_apb_i2c手册计算过程
IC_CLK_FREQ_OPTIMIZATION = 0
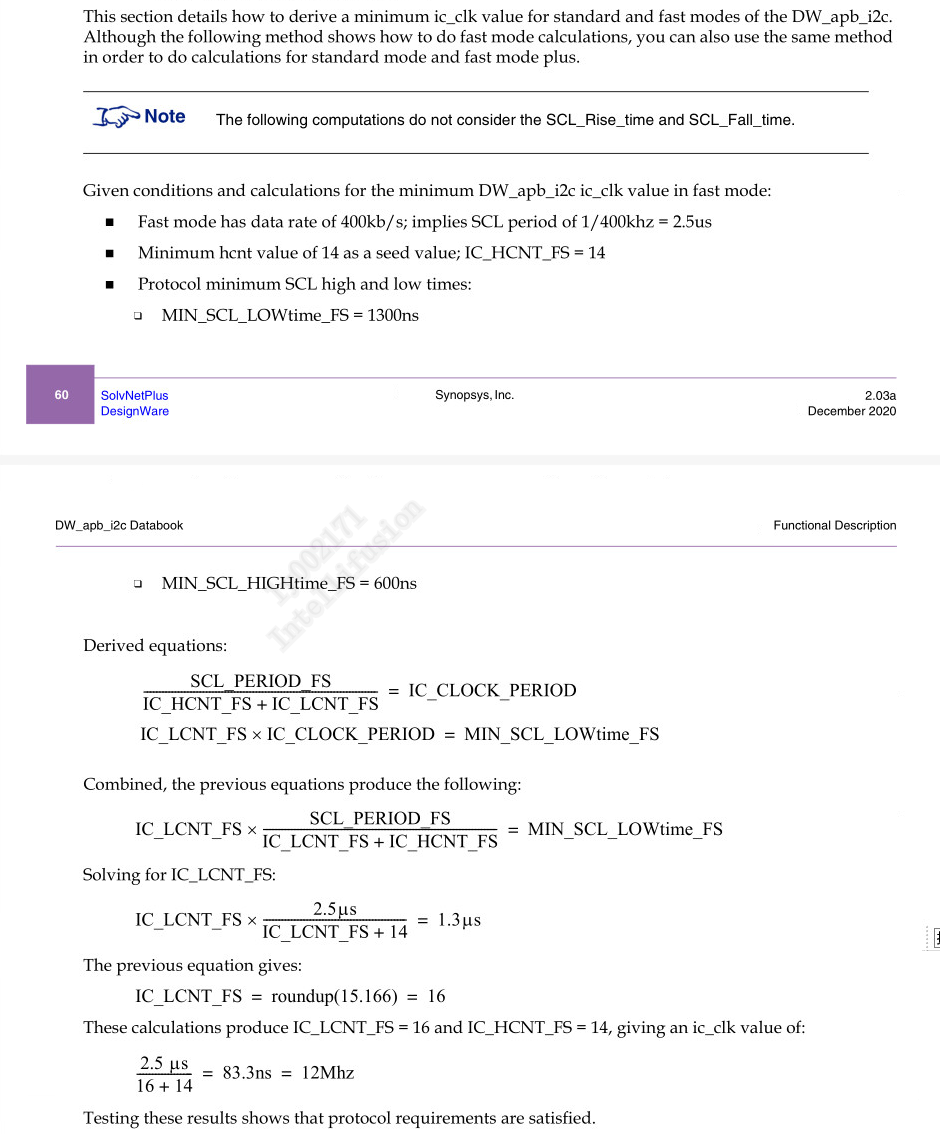
IC_CLK_FREQ_OPTIMIZATION = 1
这是在 Fast Mode(400 kb/s) 且 IC_CLK_FREQ_OPTIMIZATION = 1(优化模式) 下,推导最小 ic_clk 频率的过程。
与之前的例子相比,核心差异在于:
- 初始种子值:IC_HCNT_FS = 5(之前是 14)
- 得到的寄存器值:IC_LCNT_FS = 6,IC_HCNT_FS = 5
- 最终最小 ic_clk 频率:4.4 MHz(之前是 12 MHz)
- 特殊约束:IC_LCNT_FS 必须 ≥ 6(优化模式下硬件强制最小值)
计算过程中:
计算结果 5.417 小于优化模式下 IC_LCNT_FS 的硬件最小值 6。文档明确指出:如果计算值小于 6,则必须取 6。
所以最终 IC_LCNT_FS=6
rise time和fall time的影响因素

ic_clk - high_cnt - low_cnt
其他模式
Ultra mode,Slave mode下的计算方式,参考控制器手册。
Clocks & Resets
Clocks
- pclk: apb clock for bus interface unit
- ic_clk: peripheral clock on which dw_apb_i2c runs, clock transfer in standard, fast and high-speed mode
Resets
- 两个复位信号:presetn(APB 域)和 ic_rst_n(I2C 外设域)。
- 共同规则:都是 异步断言、同步释放。
- 关键约束:同步释放逻辑 不由 DW_apb_i2c 内部实现,必须由外部电路提供,否则会导致亚稳态或复位失败。
SDA Hold Time
协议要求和板级考量:
- Standard / Fast Mode:I²C 协议要求 SDA 数据保持时间 tHD;DAT = 300 ns。
- High Speed / Fast Mode Plus:要求更长的保持时间,以跨越 SCL 下降沿前后的逻辑电平不确定区。
- 板级延迟(走线、驱动等)会导致实际保持时间与理论值不符,因此需要硬件支持动态调整。
IC_SDA_HOLD 寄存器的作用:
DW_apb_i2c 提供了一个 可编程寄存器 IC_SDA_HOLD,用于精确控制 SDA 的保持时间,解决板级差异带来的时序问题。(补偿板级走线延迟,保证在任何物理条件下都满足 I²C 时序规范。)
使用规则:
- 模式切换时需重编程:
不同速度模式(SS/FS/FM+/HS)需要不同的保持时间,因此切换模式时必须重新配置 IC_SDA_HOLD。 - 写入条件:
只能在 DW_apb_i2c 禁用(IC_ENABLE[0] = 0)时写入,避免传输中时序突变。 - 默认值:
复位值由 coreConsultant 参数 IC_DEFAULT_SDA_HOLD 预配置,可在生成 IP 时定制。
SDA HOLD Timing In Recevier
IC_SDA_HOLD的单位是一个ic_clk时钟周期,最小值是0
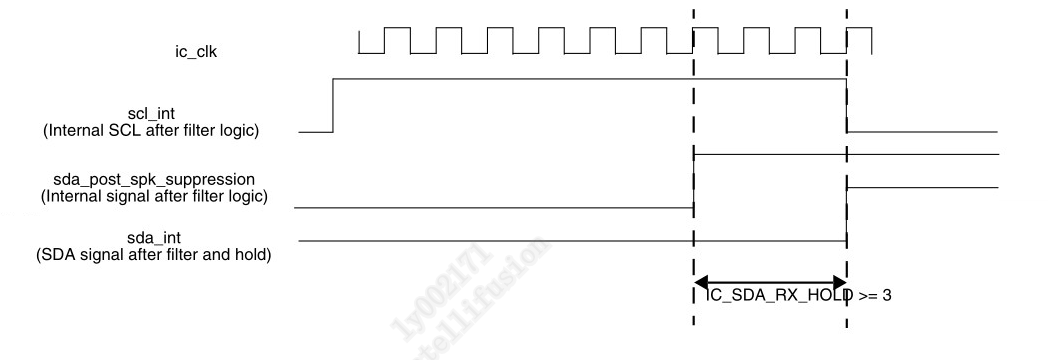
下面时序的行为:
- scl_int 保持高电平时,sda_post_spk_suppression 发生跳变。
- sda_int 不会立刻跟随跳变,而是延迟 IC_SDA_RX_HOLD 个 ic_clk 周期 后再跳变。
- 这个延迟就是 接收端的 SDA 保持时间,用于补偿板级延迟,保证 SCL 采样时数据稳定。
如下图IC_SDA_RX_HOLD只在SCL为高的情况下有效,SCL为低时,IC_SDA_RX_HOLD剩余周期(>=3部分)无效。
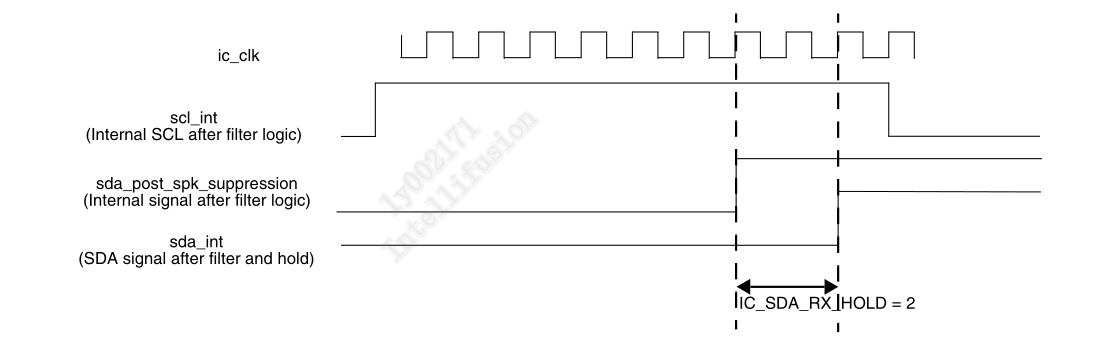
如下图IC_SDA_RX_HOLD = 2,不会超过SCL高电平所在范围。
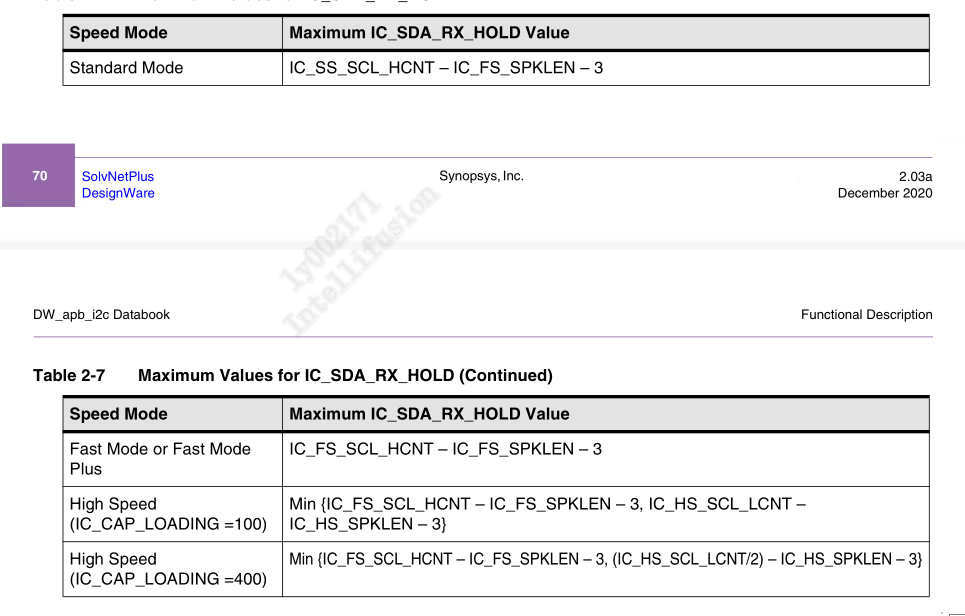
最大值限制:
SDA HOLD Timing In Transmitter
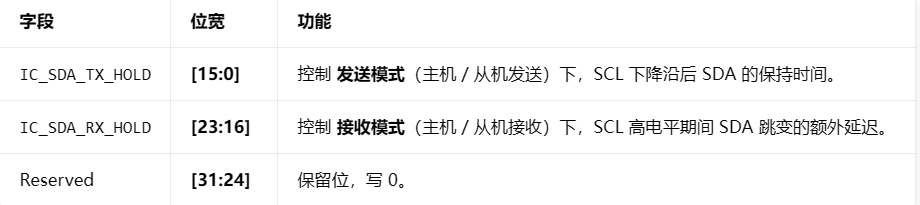
IC_SDA_TX_HOLD 是 DW_apb_i2c 发送模式下,用于控制 SDA 数据保持时间(tHD;DAT)的可编程寄存器,单位为 1 个 ic_clk 周期。它决定了 SCL 拉低后,SDA 延迟多久再跳变,以满足 I²C 协议对数据保持时间的要求。(本质是发送端的数据保持时间补偿机制)
主机模式(Master Mode)行为
- 最小 tHD;DAT:固定为 1 个 ic_clk 周期,即使 IC_SDA_TX_HOLD = 0,SDA 也会在 SCL 拉低后延迟 1 个 ic_clk 周期再变化。
- 通用规则:当 IC_SDA_TX_HOLD ≥ 1 时,SDA 会在 SCL 拉低后,延迟 IC_SDA_TX_HOLD 个 ic_clk 周期 再驱动跳变。
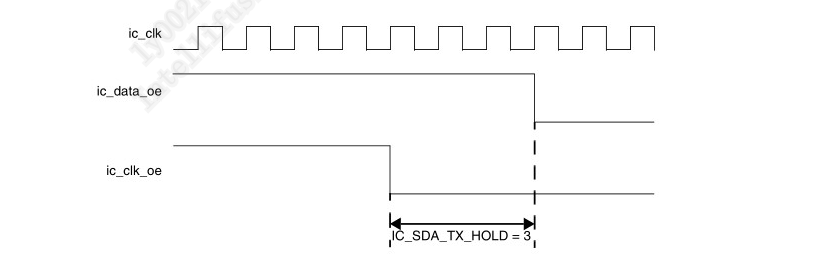
- 时序示例(IC_SDA_TX_HOLD = 3)
ic_clk_oe(SCL 驱动)拉低后,经过 3 个 ic_clk 周期,ic_data_oe(SDA 驱动)才发生跳变,这 3 个周期就是配置的 tHD;DAT。
从机模式(Slave Mode)行为
- 最小 tHD;DAT:固定为 SPKLEN + 7 个 ic_clk 周期,其中:
SS/FS/FM+ 模式:SPKLEN = IC_FS_SPKLEN - HS 模式:SPKLEN = IC_HS_SPKLEN
即使 IC_SDA_TX_HOLD < SPKLEN + 7,硬件也会强制延迟 SPKLEN + 7 个周期,用于同步和毛刺抑制。 - 通用规则:当 IC_SDA_TX_HOLD ≥ SPKLEN + 7 时,SDA 会在 SCL 输入拉低后,延迟 IC_SDA_TX_HOLD 个 ic_clk 周期 再驱动跳变。
DMA Interface
DW_apb_i2c 内置可选 DMA 功能,通过握手接口与 DMA 控制器(推荐搭配 DesignWare DW_ahb_dmac)协作,实现 I²C 数据的高效批量传输,减轻 CPU 负载。数据传输通过 APB 总线完成,接口设计通用化,可适配各类 DMA 控制器。
关键特性与约束
- DMA 类型与行为
- 搭配 DW_ahb_dmac 时,DMA 为流控制器(flow controller),由软件在 DW_ahb_dmac CTLx 寄存器中编程块大小(BLOCK_TS)。
- 优先使用 DMA 突发传输(burst transactions) 提升效率,其他 DMA 控制器行为类似。
- 状态信号说明
- dma_finish 信号用于指示块传输完成,但 DW_apb_i2c 不使用该信号,因此未出现在 I/O 端口列表中。
DMA接口使能方式
通过 IC_DMA_CR(DMA 控制寄存器) 使能对应方向的握手接口:
- 发送方向:向 TDMAE 位写 1,使能 I²C 发送 DMA 握手。
- 接收方向:向 RDMAE 位写 1,使能 I²C 接收 DMA 握手。
DMA 操作流程概览
- 处理器配置阶段
在 DW_ahb_dmac 的 CTLx 寄存器中:
BLOCK_TS:配置 I²C 要传输的总数据块大小(数据项数量)。
SRC_MSIZE / DEST_MSIZE:配置单次突发传输长度(即每次 DMA 请求传输的 FIFO 条目数)。 - 块传输拆分
总数据块会被拆分为多次突发传输,每次由 DW_apb_i2c 发起请求。
示例:块大小 = 12,突发长度 = 4 → 需发起 3 次 DMA 请求,完成全部 12 个数据项的读写。 - 数据交互
- 发送请求:DMA 向 I²C TX FIFO 写入突发长度的数据。
- 接收请求:DMA 从 I²C RX FIFO 读出突发长度的数据。
DMA 配置-作用 列表
数据块拆分示例,倍数: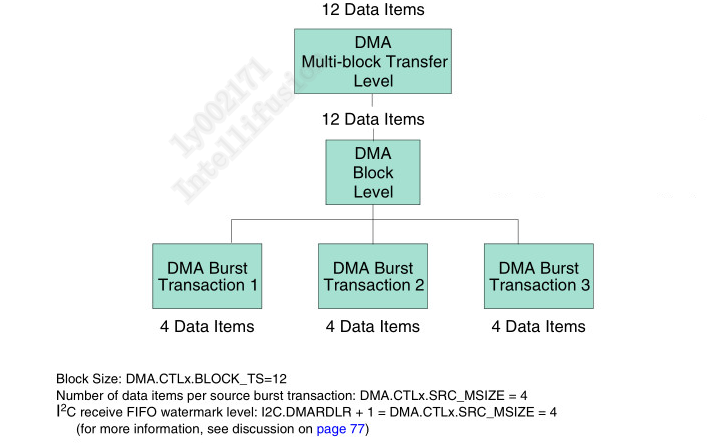
数据块拆分示例,非倍数: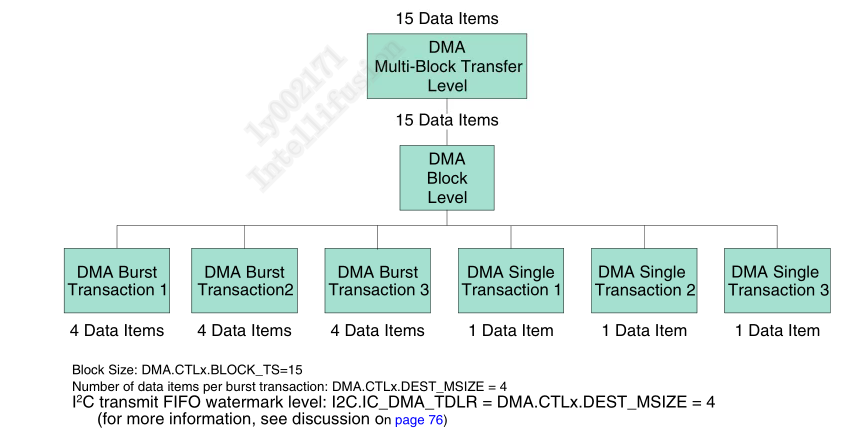
传输水线级别 和 传输FIFO下溢
我们知道IC_EMPTYFIFO_HOLD_MASTER_EN配置用于决定TX FIFO为空时,控制器是否生成STOP信号。IC_EMPTYFIFO_HOLD_MASTER_EN = 0时,如果DMA的水线级别设置不好,很容易导致I2C总线上频繁出现STOP信号,降低总线效率。
TX DATA -> DMA -> I2C TX FIFO -> I2C BUS -> DEV
TX FIFO就是水箱,DMA是往水箱加水的,I2C时从水箱取水的。
DMA TDLR寄存器设置水线,设置的约高,也就是提醒服务员(DMA)在剩余水量多的时候,就立即加水(所需水量相同的情况下,水线越高,每次补水的量就越少,需要补水次数就越多)
比如:
- TDLR = 6(高水位):水杯里还剩 6 口时就喊服务员倒水
此时水杯里还有 6 口,足够你喝很久
服务员有充足时间倒 2 口进来
你永远喝不到空杯 → 下溢概率低 - TDLR = 2(低水位):水杯里只剩 2 口时才喊服务员
只剩 2 口,很快就会喝光
服务员要倒 6 口,动作稍慢你就喝到空杯了 → 下溢概率高
硬件层面的本质:
- TDLR 越大:FIFO 剩余数据还很多时就触发 DMA,“安全余量” 更大
I2C 发送完剩余数据需要的时间更长
DMA 有足够时间完成 burst 填充 - TDLR 越小:FIFO 快空了才触发 DMA,“安全余量” 极小
剩余数据很快被发完
DMA 响应稍有延迟就会 FIFO 空 → underflow
为什么 “每次 burst 越小、突发次数越多” 反而更安全?
这是高水位配置的必然结果:TDLR ↑ → DEST_MSIZE = FIFO_DEPTH - TDLR ↓
每次 DMA 只搬少量数据(比如 2 个),但触发更频繁(15 次)
好处:
DMA 每次处理的数据量小,总线占用时间短,更容易被调度执行
触发更早,FIFO 还有大量数据时就开始填充,永远不会见底
即使某次 DMA 响应慢一点,FIFO 里还有足够数据撑到下一次填充
本质:用 “更频繁的小搬运” 换取 “更高的安全冗余”,牺牲总线效率换传输可靠性。
DMA 响应变快的原因是什么?
这里的 “响应变快” 不是指 DMA 硬件速度提升,而是系统层面更容易及时处理请求,原因有两点:
- 单次 burst 数据量小 → 总线占用时间短
小 burst(比如 2 个数据)在 AMBA 总线上传输时间更短
总线仲裁器更容易在短时间内把使用权交给 DMA
不容易被其他高优先级主设备(如 CPU、其他 DMA)长时间抢占
整体表现为:DMA 请求更容易被快速响应 - 触发时机更早 → 时间窗口更充裕
高水位触发时,FIFO 还有大量数据(比如 6 个)
I2C 发送完这些数据需要 6 × 8/bit_rate 时间
相比低水位(只剩 2 个数据,时间窗口只有 1/3),DMA 有3 倍以上的时间去完成填充
即使系统负载高、总线繁忙,也更大概率在 FIFO 空之前完成填充
水线高低设置对比: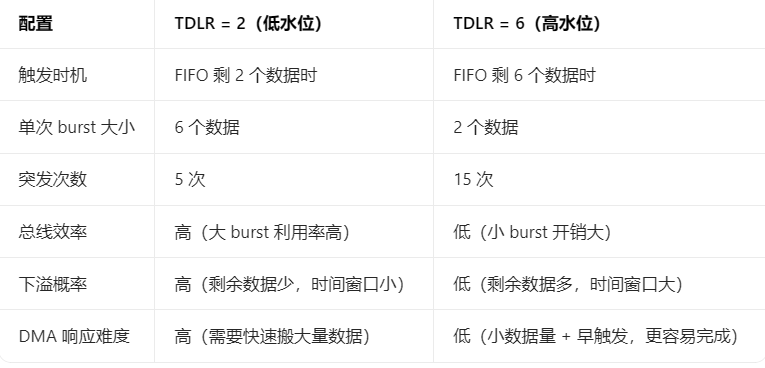
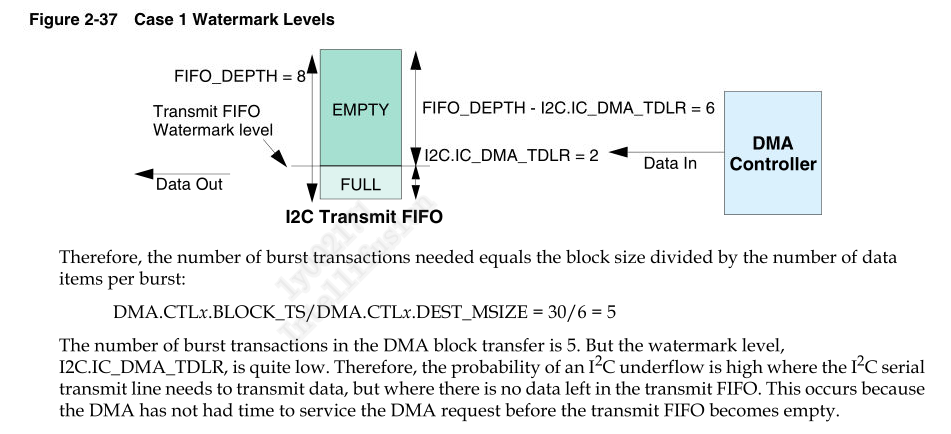
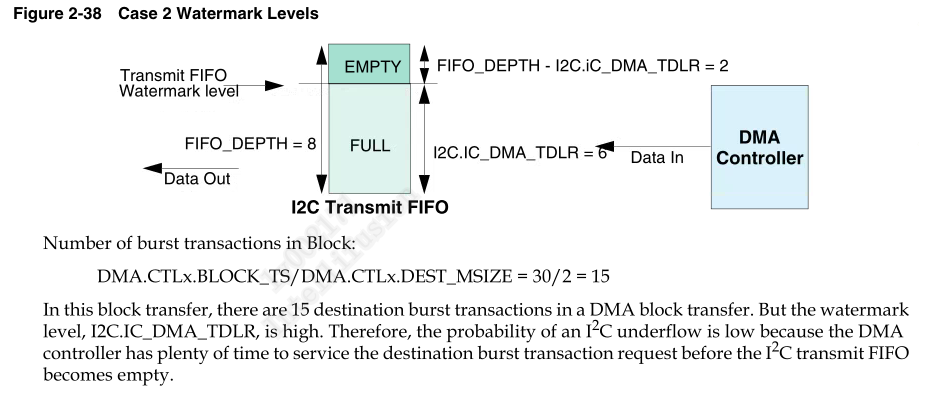
发送方向:DEST_MSIZE 与 TX FIFO 溢出控制
- 溢出风险与约束公式
当 DMA.CTLx.DEST_MSIZE > TX FIFO 剩余空间时,会发生 FIFO 溢出(Overflow),即数据写入超过 FIFO 容量导致数据丢失。为避免溢出,必须满足:
DMA.CTLx.DEST_MSIZE≤I2C.FIFO_DEPTH−I2C.IC_DMA_TDLR
I2C.FIFO_DEPTH:TX FIFO 总深度
I2C.IC_DMA_TDLR:发送水位阈值(FIFO ≤ 该值时触发 DMA)
右侧值:触发 DMA 时 TX FIFO 的剩余空闲空间 - 最优配置(平衡效率与安全)
为最大化总线利用率、减少突发次数,最优配置为:
DMA.CTLx.DEST_MSIZE=I2C.FIFO_DEPTH−I2C.IC_DMA_TDLR
此时 DMA 突发长度恰好等于 FIFO 剩余空间,既不会溢出,也能让每次填充量最大。 - 特殊说明
若在 DMA 突发传输期间,I²C 已成功发送 ≥1 个数据,则 FIFO 不会被填满(因为发送消耗了空间)。
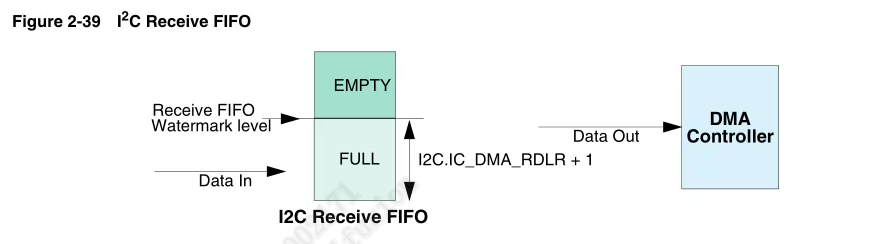
接收方向:RX FIFO 水位与溢出 / 下溢控制
- 接收 DMA 请求触发逻辑
当 RX FIFO 条目数 ≥ IC_DMA_RDLR + 1 时,DW_apb_i2c 向 DMA 发起接收请求,DMA 会读取长度为 CTLx.SRC_MSIZE 的突发数据。
若 DMA 不及时读取,RX FIFO 会被填满 → 溢出(Overflow)
若 SRC_MSIZE 配置过大,可能导致 FIFO 被读空 → 下溢(Underflow) - 水位选择的权衡
接收水位 IC_DMA_RDLR + 1 的选择逻辑与发送端一致:
高水位:更早触发 DMA,溢出概率更低,但突发次数更多、总线利用率更低
低水位:减少突发次数、提升总线效率,但溢出概率更高 - 下溢风险与约束公式
为避免 RX FIFO 下溢(读空),必须满足:DMA.CTLx.SRC_MSIZE=I2C.IC_DMA_RDLR+1
此时DMA 突发长度等于触发请求时 FIFO 的数据量,刚好读完水位以上数据,不会读空
该配置同时减少了突发次数,提升了 AMBA 总线利用率
- 特殊说明
若在 DMA 突发读取期间,I²C 已成功接收 ≥1 个数据,则 RX FIFO 不会被读空(因为接收补充了数据)。
DMA握手信号
不做解析,简单看看。验证遇到问题再看。
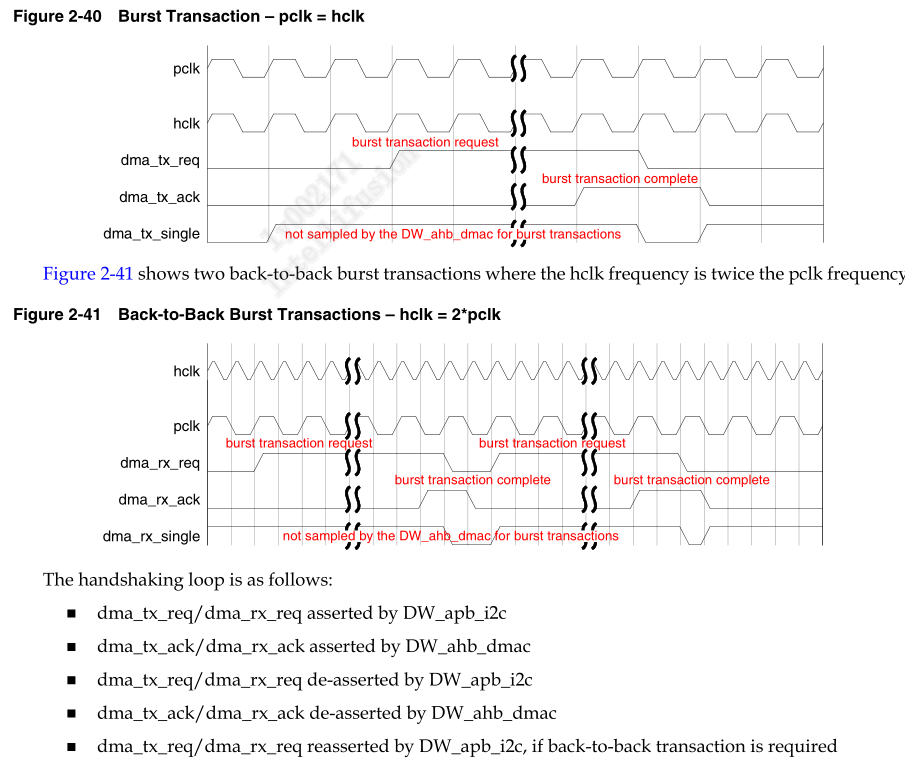
Signals
Interrupt信号
TODO
I2C信号

DMA信号
TODO